 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Imitation: Constraint-Aware Trajectory Generation with Flow Matching For End-to-End Autonomous Driving
Oct 30, 2025Planning is a critical component of end-to-end autonomous driving. However, prevailing imitation learning methods often suffer from mode collapse, failing to produce diverse trajectory hypotheses. Meanwhile, existing generative approaches struggle to incorporate crucial safety and physical constraints directly into the generative process, necessitating an additional optimization stage to refine their outputs. To address these limitations, we propose CATG, a novel planning framework that leverages Constrained Flow Matching. Concretely, CATG explicitly models the flow matching process, which inherently mitigates mode collapse and allows for flexible guidance from various conditioning signals. Our primary contribution is the novel imposition of explicit constraints directly within the flow matching process, ensuring that the generated trajectories adhere to vital safety and kinematic rules. Secondly, CATG parameterizes driving aggressiveness as a control signal during generation, enabling precise manipulation of trajectory style. Notably, on the NavSim v2 challenge, CATG achieved 2nd place with an EPDMS score of 51.31 and was honored with the Innovation Award.
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection
Jun 21, 2022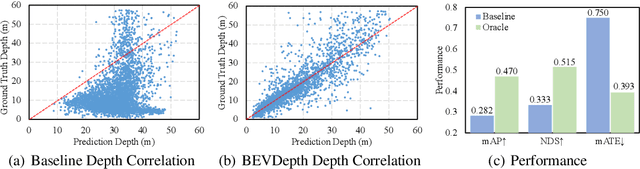
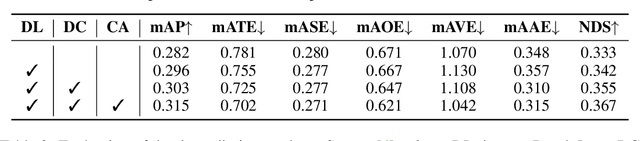
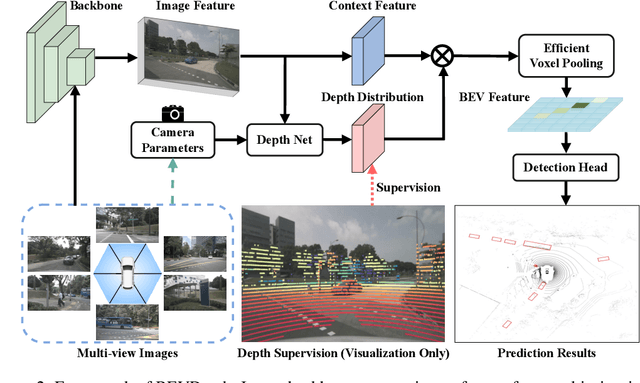
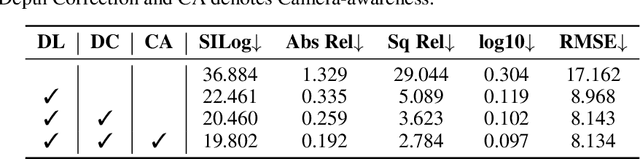
In this research, we propose a new 3D object detector with a trustworthy depth estimation, dubbed BEVDepth, for camera-based Bird's-Eye-View (BEV) 3D object detection. By a thorough analysis of recent approaches, we discover that the depth estimation is implicitly learned without camera information, making it the de-facto fake-depth for creating the following pseudo point cloud. BEVDepth gets explicit depth supervision utilizing encoded intrinsic and extrinsic parameters. A depth correction sub-network is further introduced to counteract projecting-induced disturbances in depth ground truth. To reduce the speed bottleneck while projecting features from image-view into BEV using estimated depth, a quick view-transform operation is also proposed. Besides, our BEVDepth can be easily extended with input from multi-frame. Without any bells and whistles, BEVDepth achieves the new state-of-the-art 60.0% NDS on the challenging nuScenes test set while maintaining high efficiency. For the first time, the performance gap between the camera and LiDAR is largely reduced within 10% NDS.