 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeESC: Evolutionary Stitched Camera Calibration in the Wild
Apr 19, 2024



This work introduces a novel end-to-end approach for estimating extrinsic parameters of cameras in multi-camera setups on real-life sports fields. We identify the source of significant calibration errors in multi-camera environments and address the limitations of existing calibration methods, particularly the disparity between theoretical models and actual sports field characteristics. We propose the Evolutionary Stitched Camera calibration (ESC) algorithm to bridge this gap. It consists of image segmentation followed by evolutionary optimization of a novel loss function, providing a unified and accurate multi-camera calibration solution with high visual fidelity. The outcome allows the creation of virtual stitched views from multiple video sources, being as important for practical applications as numerical accuracy. We demonstrate the superior performance of our approach compared to state-of-the-art methods across diverse real-life football fields with varying physical characteristics.
Beyond Grids: Exploring Elastic Input Sampling for Vision Transformers
Sep 23, 2023Vision transformers have excelled in various computer vision tasks but mostly rely on rigid input sampling using a fixed-size grid of patches. This limits their applicability in real-world problems, such as in the field of robotics and UAVs, where one can utilize higher input elasticity to boost model performance and efficiency. Our paper addresses this limitation by formalizing the concept of input elasticity for vision transformers and introducing an evaluation protocol, including dedicated metrics for measuring input elasticity. Moreover, we propose modifications to the transformer architecture and training regime, which increase its elasticity. Through extensive experimentation, we spotlight opportunities and challenges associated with input sampling strategies.
Active Visual Exploration Based on Attention-Map Entropy
Mar 11, 2023



Active visual exploration addresses the issue of limited sensor capabilities in real-world scenarios, where successive observations are actively chosen based on the environment. To tackle this problem, we introduce a new technique called Attention-Map Entropy (AME). It leverages the internal uncertainty of the transformer-based model to determine the most informative observations. In contrast to existing solutions, it does not require additional loss components, which simplifies the training. Through experiments, which also mimic retina-like sensors, we show that such simplified training significantly improves the performance of reconstruction and classification on publicly available datasets.
Sports Camera Pose Refinement Using an Evolution Strategy
Nov 03, 2022This paper presents a robust end-to-end method for sports cameras extrinsic parameters optimization using a novel evolution strategy. First, we developed a neural network architecture for an edge or area-based segmentation of a sports field. Secondly, we implemented the evolution strategy, which purpose is to refine extrinsic camera parameters given a single, segmented sports field image. Experimental comparison with state-of-the-art camera pose refinement methods on real-world data demonstrates the superiority of the proposed algorithm. We also perform an ablation study and propose a way to generalize the method to additionally refine the intrinsic camera matrix.
Graph-Based Multi-Camera Soccer Player Tracker
Nov 03, 2022



The paper presents a multi-camera tracking method intended for tracking soccer players in long shot video recordings from multiple calibrated cameras installed around the playing field. The large distance to the camera makes it difficult to visually distinguish individual players, which adversely affects the performance of traditional solutions relying on the appearance of tracked objects. Our method focuses on individual player dynamics and interactions between neighborhood players to improve tracking performance. To overcome the difficulty of reliably merging detections from multiple cameras in the presence of calibration errors, we propose the novel tracking approach, where the tracker operates directly on raw detection heat maps from multiple cameras. Our model is trained on a large synthetic dataset generated using Google Research Football Environment and fine-tuned using real-world data to reduce costs involved with ground truth preparation.
SuperNCN: Neighbourhood consensus network for robust outdoor scenes matching
Dec 10, 2019


In this paper, we present a framework for computing dense keypoint correspondences between images under strong scene appearance changes. Traditional methods, based on nearest neighbour search in the feature descriptor space, perform poorly when environmental conditions vary, e.g. when images are taken at different times of the day or seasons. Our method improves finding keypoint correspondences in such difficult conditions. First, we use Neighbourhood Consensus Networks to build spatially consistent matching grid between two images at a coarse scale. Then, we apply Superpoint-like corner detector to achieve pixel-level accuracy. Both parts use features learned with domain adaptation to increase robustness against strong scene appearance variations. The framework has been tested on a RobotCar Seasons dataset, proving large improvement on pose estimation task under challenging environmental conditions.
FootAndBall: Integrated player and ball detector
Dec 10, 2019
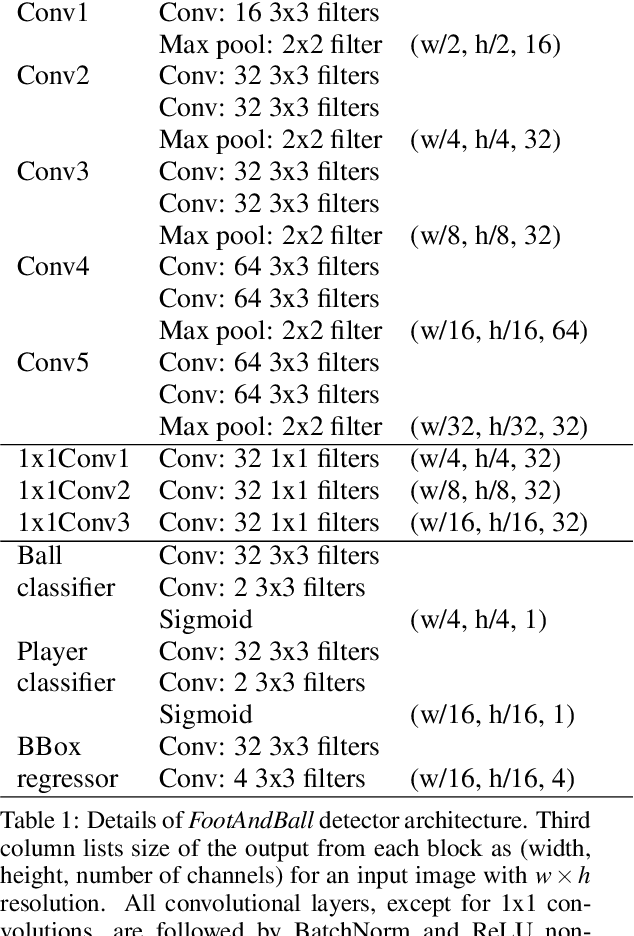
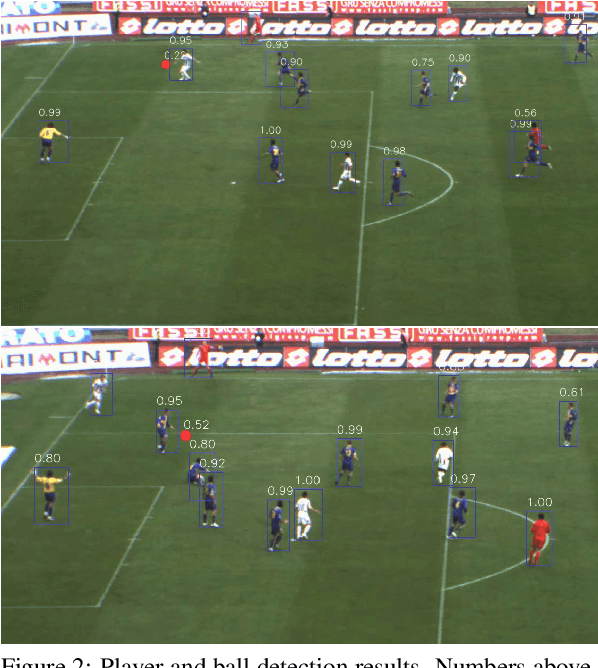
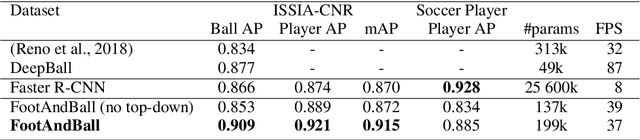
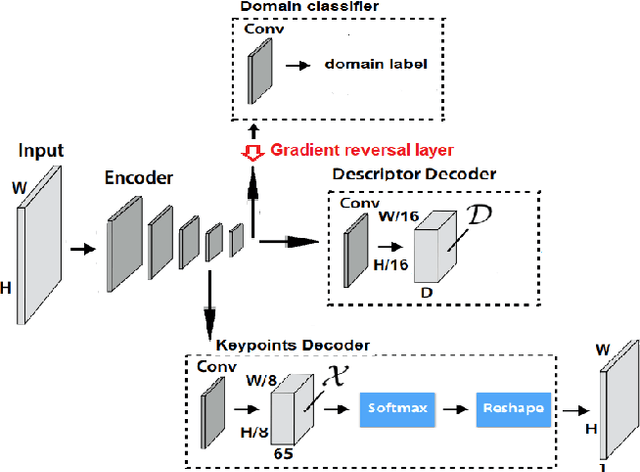
The paper describes a deep neural network-based detector dedicated for ball and players detection in high resolution, long shot, video recordings of soccer matches. The detector, dubbed FootAndBall, has an efficient fully convolutional architecture and can operate on input video stream with an arbitrary resolution. It produces ball confidence map encoding the position of the detected ball, player confidence map and player bounding boxes tensor encoding players' positions and bounding boxes. The network uses Feature Pyramid Network desing pattern, where lower level features with higher spatial resolution are combined with higher level features with bigger receptive field. This improves discriminability of small objects (the ball) as larger visual context around the object of interest is taken into account for the classification. Due to its specialized design, the network has two orders of magnitude less parameters than a generic deep neural network-based object detector, such as SSD or YOLO. This allows real-time processing of high resolution input video stream.
DeepBall: Deep Neural-Network Ball Detector
Feb 19, 2019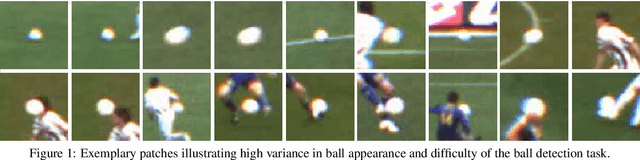
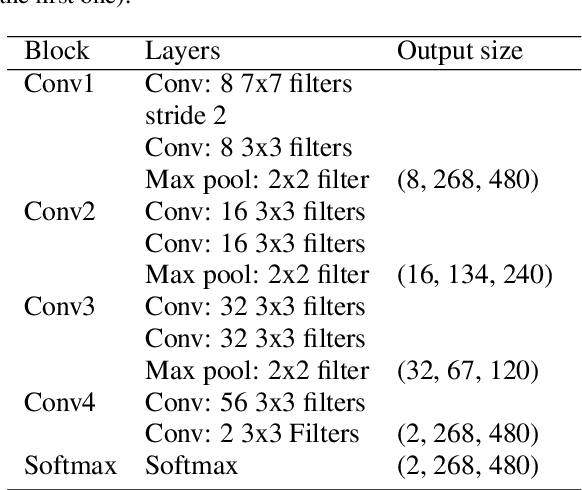
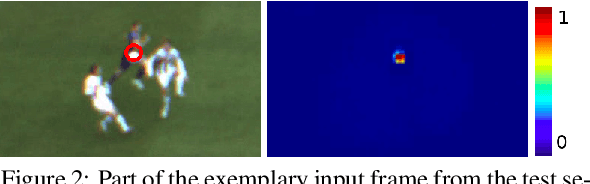
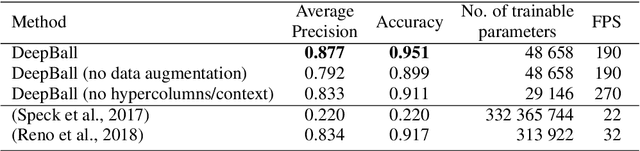
The paper describes a deep network based object detector specialized for ball detection in long shot videos. Due to its fully convolutional design, the method operates on images of any size and produces \emph{ball confidence map} encoding the position of detected ball. The network uses hypercolumn concept, where feature maps from different hierarchy levels of the deep convolutional network are combined and jointly fed to the convolutional classification layer. This allows boosting the detection accuracy as larger visual context around the object of interest is taken into account. The method achieves state-of-the-art results when tested on publicly available ISSIA-CNR Soccer Dataset.
SConE: Siamese Constellation Embedding Descriptor for Image Matching
Sep 28, 2018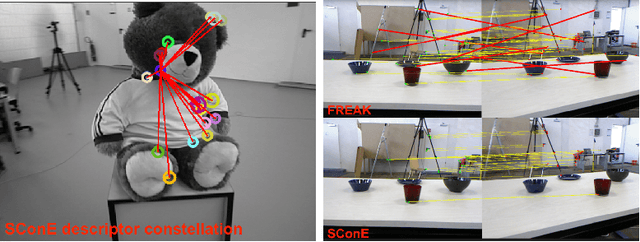
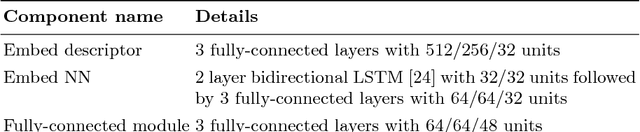
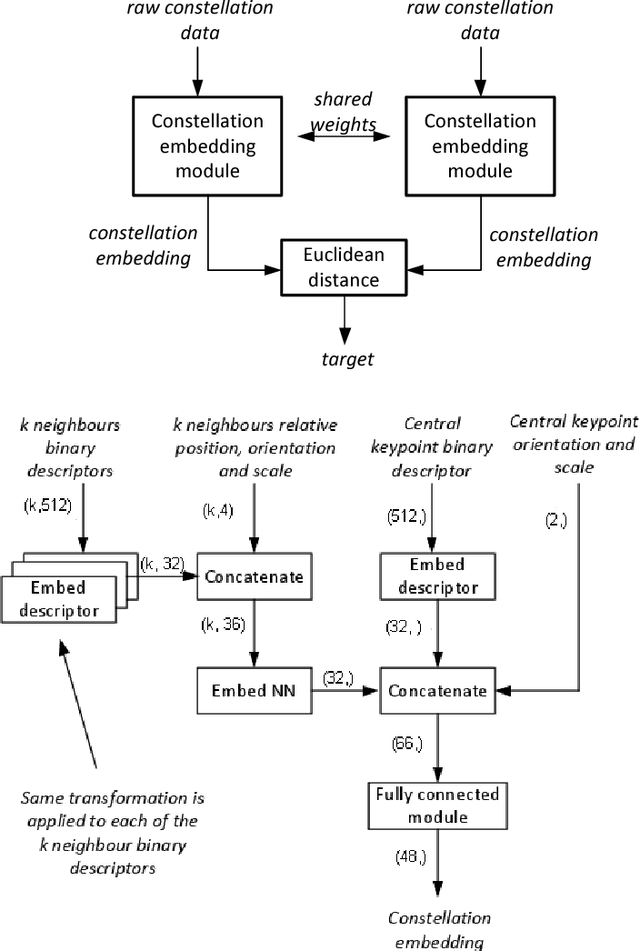
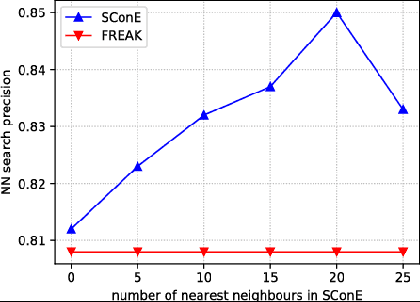
Numerous computer vision applications rely on local feature descriptors, such as SIFT, SURF or FREAK, for image matching. Although their local character makes image matching processes more robust to occlusions, it often leads to geometrically inconsistent keypoint matches that need to be filtered out, e.g. using RANSAC. In this paper we propose a novel, more discriminative, descriptor that includes not only local feature representation, but also information about the geometric layout of neighbouring keypoints. To that end, we use a Siamese architecture that learns a low-dimensional feature embedding of keypoint constellation by maximizing the distances between non-corresponding pairs of matched image patches, while minimizing it for correct matches. The 48-dimensional oating point descriptor that we train is built on top of the state-of-the-art FREAK descriptor achieves significant performance improvement over the competitors on a challenging TUM dataset.
Robust Method of Vote Aggregation and Proposition Verification for Invariant Local Features
Jan 05, 2016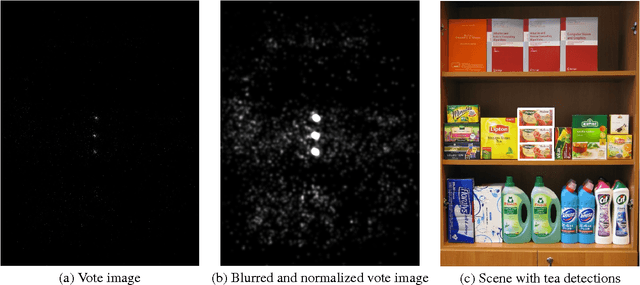
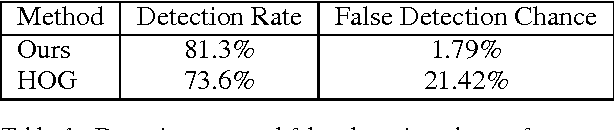
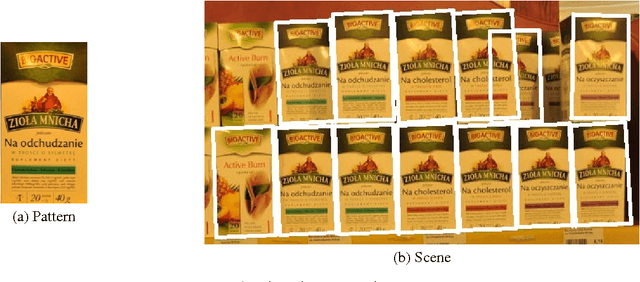
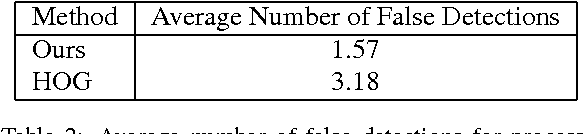
This paper presents a method for analysis of the vote space created from the local features extraction process in a multi-detection system. The method is opposed to the classic clustering approach and gives a high level of control over the clusters composition for further verification steps. Proposed method comprises of the graphical vote space presentation, the proposition generation, the two-pass iterative vote aggregation and the cascade filters for verification of the propositions. Cascade filters contain all of the minor algorithms needed for effective object detection verification. The new approach does not have the drawbacks of the classic clustering approaches and gives a substantial control over process of detection. Method exhibits an exceptionally high detection rate in conjunction with a low false detection chance in comparison to alternative methods.