 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperNCN: Neighbourhood consensus network for robust outdoor scenes matching
Dec 10, 2019


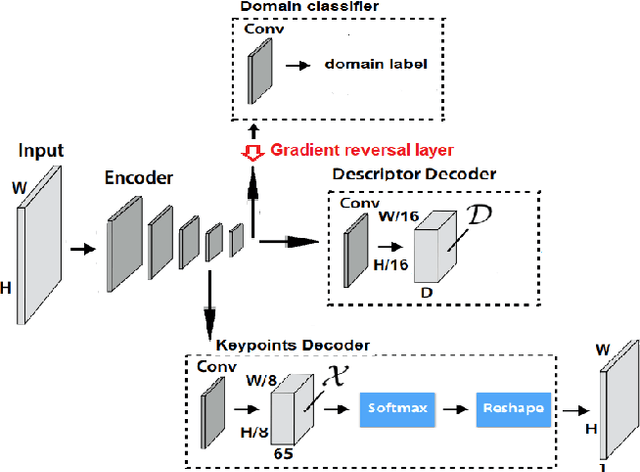
In this paper, we present a framework for computing dense keypoint correspondences between images under strong scene appearance changes. Traditional methods, based on nearest neighbour search in the feature descriptor space, perform poorly when environmental conditions vary, e.g. when images are taken at different times of the day or seasons. Our method improves finding keypoint correspondences in such difficult conditions. First, we use Neighbourhood Consensus Networks to build spatially consistent matching grid between two images at a coarse scale. Then, we apply Superpoint-like corner detector to achieve pixel-level accuracy. Both parts use features learned with domain adaptation to increase robustness against strong scene appearance variations. The framework has been tested on a RobotCar Seasons dataset, proving large improvement on pose estimation task under challenging environmental conditions.
SConE: Siamese Constellation Embedding Descriptor for Image Matching
Sep 28, 2018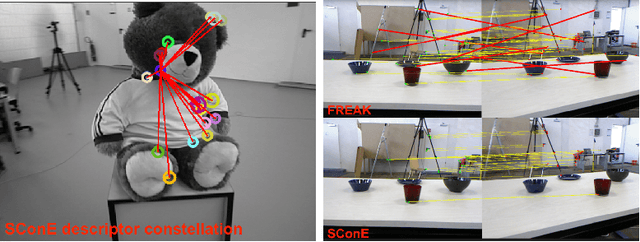
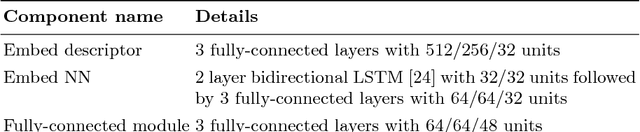
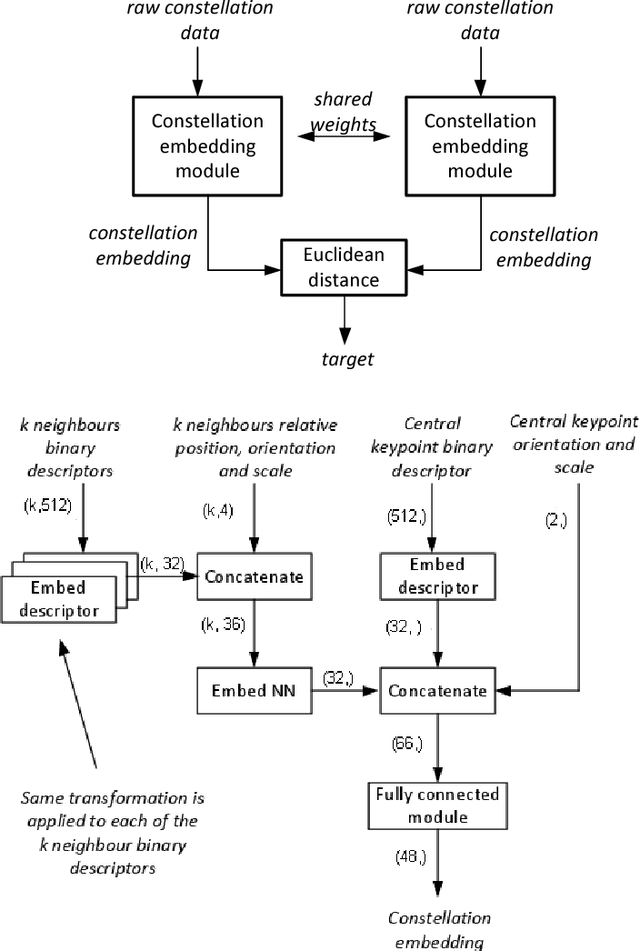
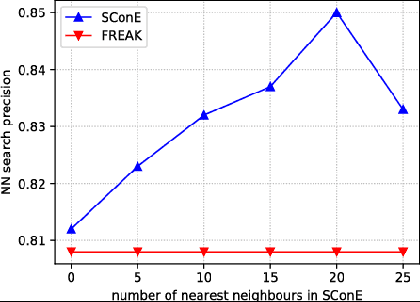
Numerous computer vision applications rely on local feature descriptors, such as SIFT, SURF or FREAK, for image matching. Although their local character makes image matching processes more robust to occlusions, it often leads to geometrically inconsistent keypoint matches that need to be filtered out, e.g. using RANSAC. In this paper we propose a novel, more discriminative, descriptor that includes not only local feature representation, but also information about the geometric layout of neighbouring keypoints. To that end, we use a Siamese architecture that learns a low-dimensional feature embedding of keypoint constellation by maximizing the distances between non-corresponding pairs of matched image patches, while minimizing it for correct matches. The 48-dimensional oating point descriptor that we train is built on top of the state-of-the-art FREAK descriptor achieves significant performance improvement over the competitors on a challenging TUM dataset.
Interest point detectors stability evaluation on ApolloScape dataset
Sep 28, 2018
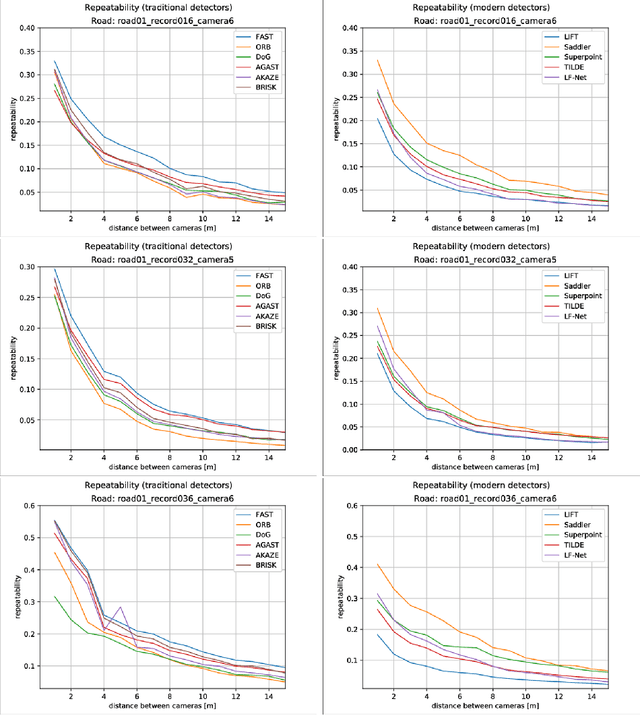
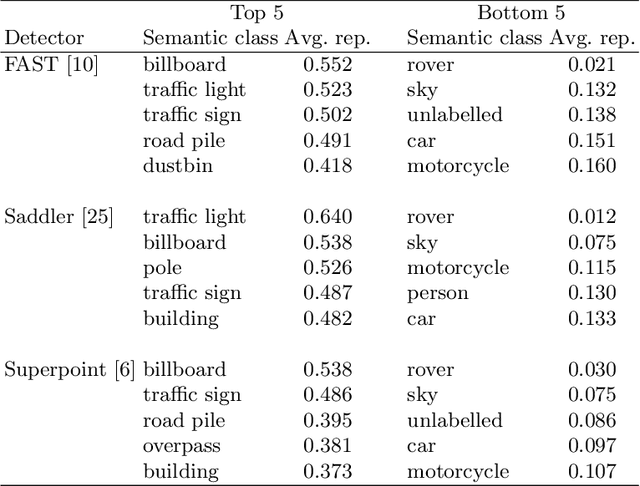

In the recent years, a number of novel, deep-learning based, interest point detectors, such as LIFT, DELF, Superpoint or LF-Net was proposed. However there's a lack of a standard benchmark to evaluate suitability of these novel keypoint detectors for real-live applications such as autonomous driving. Traditional benchmarks (e.g. Oxford VGG) are rather limited, as they consist of relatively few images of mostly planar scenes taken in favourable conditions. In this paper we verify if the recent, deep-learning based interest point detectors have the advantage over the traditional, hand-crafted keypoint detectors. To this end, we evaluate stability of a number of hand crafted and recent, learning-based interest point detectors on the street-level view ApolloScape dataset.