 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterest point detectors stability evaluation on ApolloScape dataset
Paper and Code
Sep 28, 2018
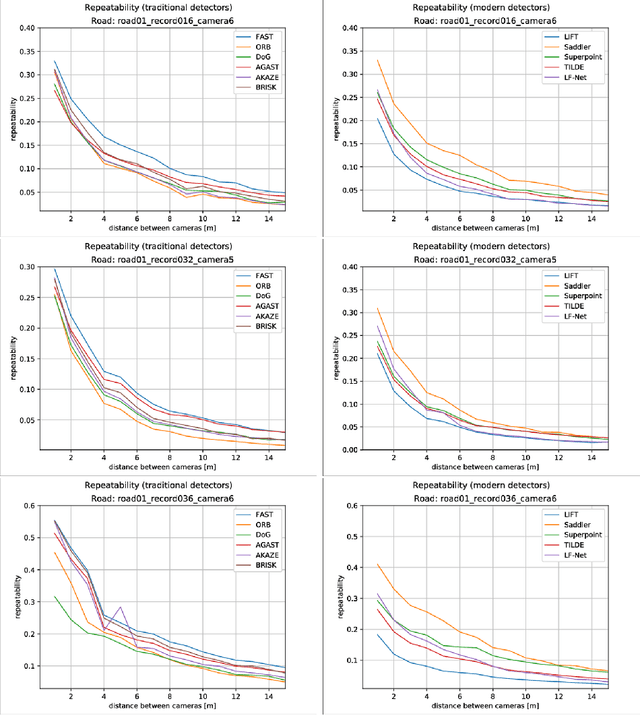
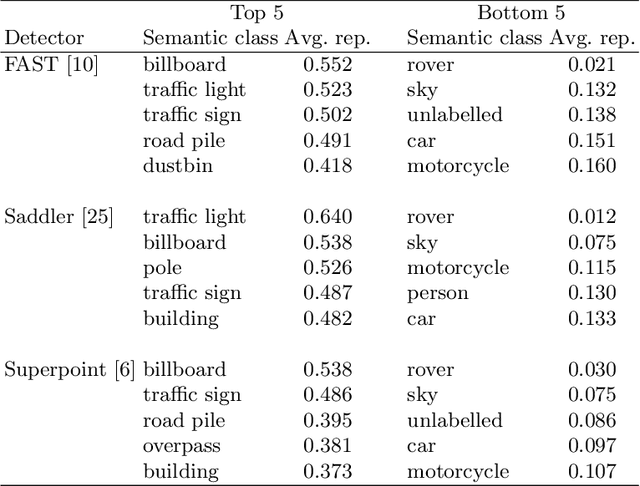

In the recent years, a number of novel, deep-learning based, interest point detectors, such as LIFT, DELF, Superpoint or LF-Net was proposed. However there's a lack of a standard benchmark to evaluate suitability of these novel keypoint detectors for real-live applications such as autonomous driving. Traditional benchmarks (e.g. Oxford VGG) are rather limited, as they consist of relatively few images of mostly planar scenes taken in favourable conditions. In this paper we verify if the recent, deep-learning based interest point detectors have the advantage over the traditional, hand-crafted keypoint detectors. To this end, we evaluate stability of a number of hand crafted and recent, learning-based interest point detectors on the street-level view ApolloScape dataset.