 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn informative path planning framework for UAV-based terrain monitoring
Sep 08, 2018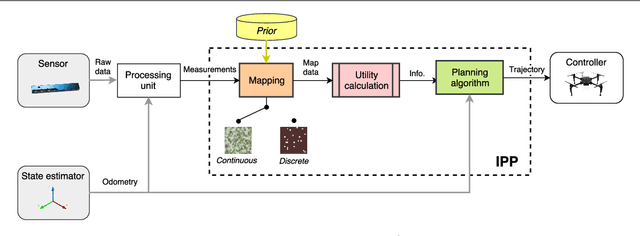
Unmanned aerial vehicles (UAVs) represent a new frontier in a wide range of monitoring and research applications. To fully leverage their potential, a key challenge is planning missions for efficient data acquisition in complex environments. To address this issue, this article introduces a general informative path planning (IPP) framework for monitoring scenarios using an aerial robot. The approach is capable of mapping either discrete or continuous target variables on a terrain using variable-resolution data received from probabilistic sensors. During a mission, the terrain maps built online are used to plan information-rich trajectories in continuous 3-D space by optimizing initial solutions obtained by a course grid search. Extensive simulations show that our approach is more efficient than existing methods. We also demonstrate its real-time application on a photorealistic mapping scenario using a publicly available dataset.
Multi-agent Time-based Decision-making for the Search and Action Problem
Mar 13, 2018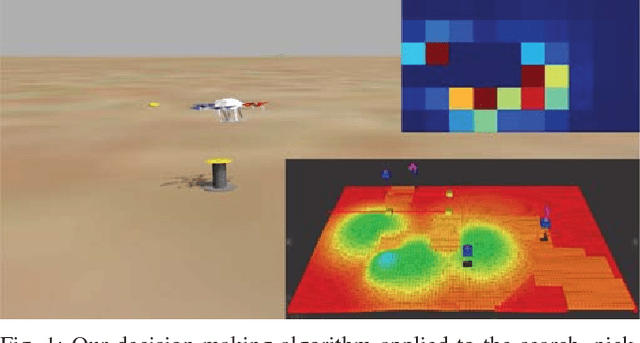

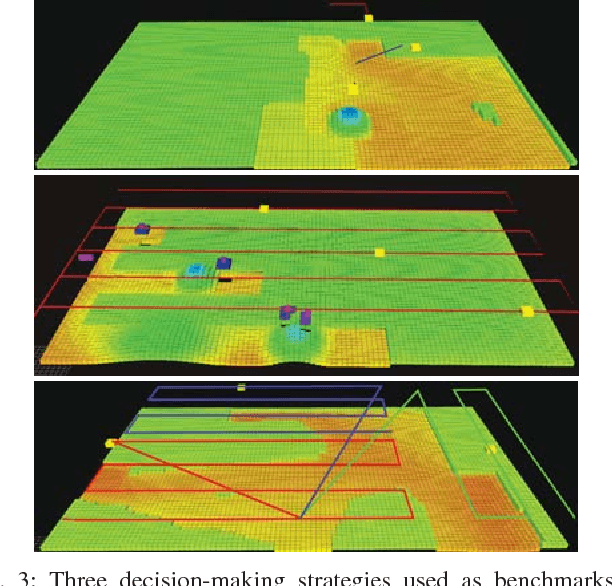
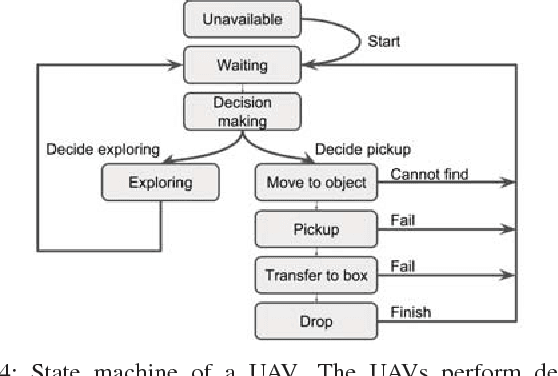
Many robotic applications, such as search-and-rescue, require multiple agents to search for and perform actions on targets. However, such missions present several challenges, including cooperative exploration, task selection and allocation, time limitations, and computational complexity. To address this, we propose a decentralized multi-agent decision-making framework for the search and action problem with time constraints. The main idea is to treat time as an allocated budget in a setting where each agent action incurs a time cost and yields a certain reward. Our approach leverages probabilistic reasoning to make near-optimal decisions leading to maximized reward. We evaluate our method in the search, pick, and place scenario of the Mohamed Bin Zayed International Robotics Challenge (MBZIRC), by using a probability density map and reward prediction function to assess actions. Extensive simulations show that our algorithm outperforms benchmark strategies, and we demonstrate system integration in a Gazebo-based environment, validating the framework's readiness for field application.
Multiresolution Mapping and Informative Path Planning for UAV-based Terrain Monitoring
Mar 08, 2017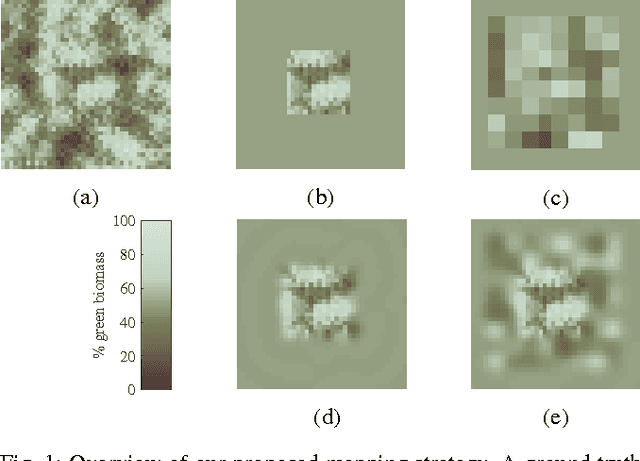
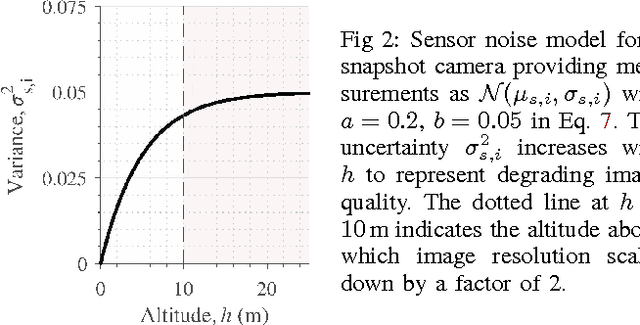
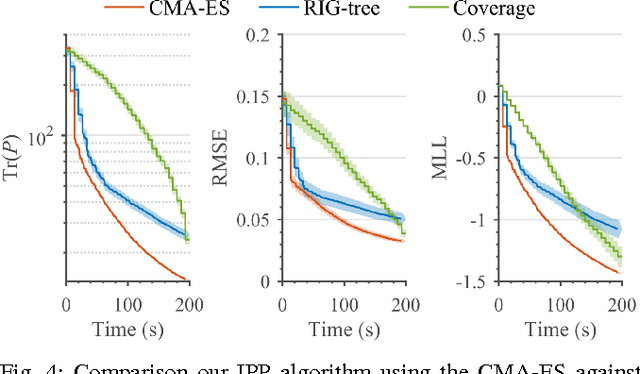
Unmanned aerial vehicles (UAVs) can offer timely and cost-effective delivery of high-quality sensing data. How- ever, deciding when and where to take measurements in complex environments remains an open challenge. To address this issue, we introduce a new multiresolution mapping approach for informative path planning in terrain monitoring using UAVs. Our strategy exploits the spatial correlation encoded in a Gaussian Process model as a prior for Bayesian data fusion with probabilistic sensors. This allows us to incorporate altitude-dependent sensor models for aerial imaging and perform constant-time measurement updates. The resulting maps are used to plan information-rich trajectories in continuous 3-D space through a combination of grid search and evolutionary optimization. We evaluate our framework on the application of agricultural biomass monitoring. Extensive simulations show that our planner performs better than existing methods, with mean error reductions of up to 45% compared to traditional "lawnmower" coverage. We demonstrate proof of concept using a multirotor to map color in different environments.
Online Informative Path Planning for Active Classification Using UAVs
Sep 27, 2016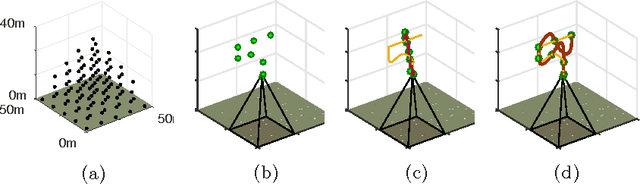

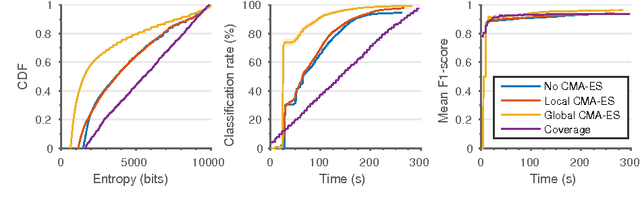
In this paper, we introduce an informative path planning (IPP) framework for active classification using unmanned aerial vehicles (UAVs). Our algorithm uses a combination of global viewpoint selection and evolutionary optimization to refine the planned trajectory in continuous 3D space while satisfying dynamic constraints. Our approach is evaluated on the application of weed detection for precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate adaptive plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We validate our approach in simulation by comparing against existing methods, and study the effects of different planning strategies. Our results show that the proposed algorithm builds maps with over 50% lower entropy compared to traditional "lawnmower" coverage in the same amount of time. We demonstrate the planning scheme on a multirotor platform with different artificial farmland set-ups.
Online Informative Path Planning for Active Classification on UAVs
Jul 13, 2016We propose an informative path planning (IPP) algorithm for active classification using an unmanned aerial vehicle (UAV), focusing on weed detection in precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We use a combination of global viewpoint selection and evolutionary optimization to refine the UAV's trajectory in continuous space while satisfying dynamic constraints. We validate our approach in simulation by comparing against standard "lawnmower" coverage, and study the effects of varying objectives and optimization strategies. We plan to evaluate our algorithm on a real platform in the immediate future.