 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Informative Path Planning for Active Classification Using UAVs
Paper and Code
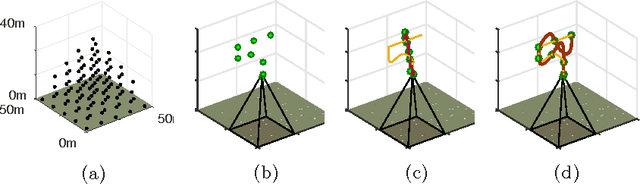

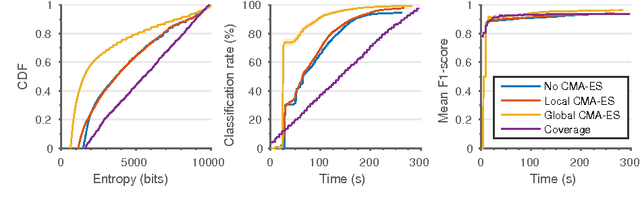
In this paper, we introduce an informative path planning (IPP) framework for active classification using unmanned aerial vehicles (UAVs). Our algorithm uses a combination of global viewpoint selection and evolutionary optimization to refine the planned trajectory in continuous 3D space while satisfying dynamic constraints. Our approach is evaluated on the application of weed detection for precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate adaptive plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We validate our approach in simulation by comparing against existing methods, and study the effects of different planning strategies. Our results show that the proposed algorithm builds maps with over 50% lower entropy compared to traditional "lawnmower" coverage in the same amount of time. We demonstrate the planning scheme on a multirotor platform with different artificial farmland set-ups.