 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiresolution Mapping and Informative Path Planning for UAV-based Terrain Monitoring
Paper and Code
Mar 08, 2017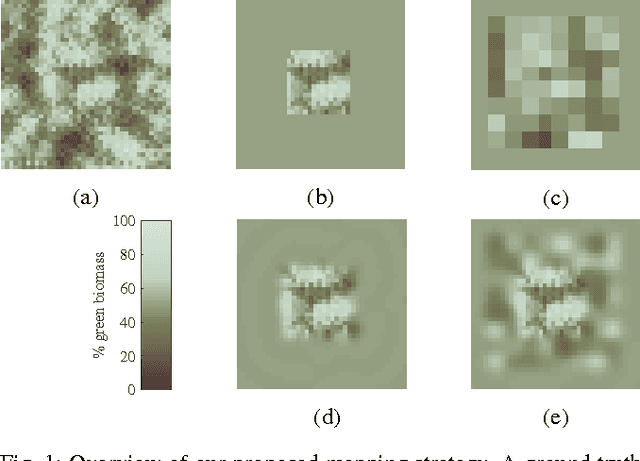
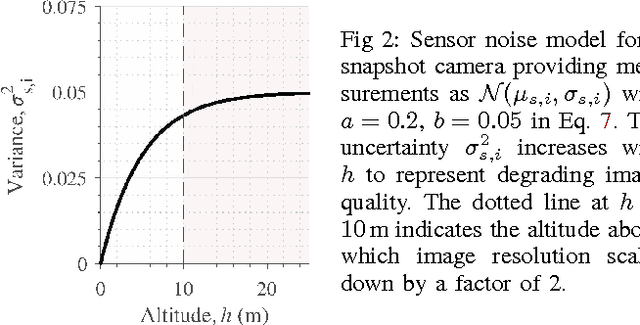
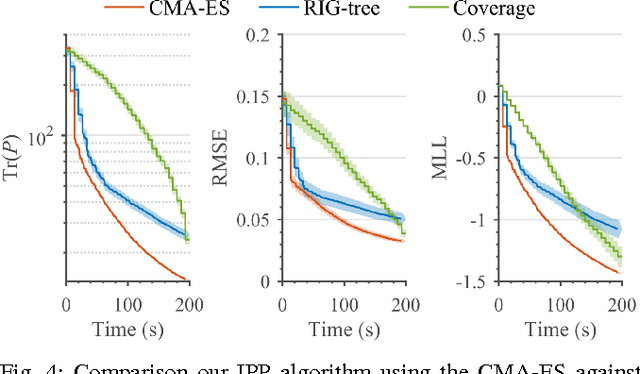
Unmanned aerial vehicles (UAVs) can offer timely and cost-effective delivery of high-quality sensing data. How- ever, deciding when and where to take measurements in complex environments remains an open challenge. To address this issue, we introduce a new multiresolution mapping approach for informative path planning in terrain monitoring using UAVs. Our strategy exploits the spatial correlation encoded in a Gaussian Process model as a prior for Bayesian data fusion with probabilistic sensors. This allows us to incorporate altitude-dependent sensor models for aerial imaging and perform constant-time measurement updates. The resulting maps are used to plan information-rich trajectories in continuous 3-D space through a combination of grid search and evolutionary optimization. We evaluate our framework on the application of agricultural biomass monitoring. Extensive simulations show that our planner performs better than existing methods, with mean error reductions of up to 45% compared to traditional "lawnmower" coverage. We demonstrate proof of concept using a multirotor to map color in different environments.