 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastCAD: Real-Time CAD Retrieval and Alignment from Scans and Videos
Mar 22, 2024



Digitising the 3D world into a clean, CAD model-based representation has important applications for augmented reality and robotics. Current state-of-the-art methods are computationally intensive as they individually encode each detected object and optimise CAD alignments in a second stage. In this work, we propose FastCAD, a real-time method that simultaneously retrieves and aligns CAD models for all objects in a given scene. In contrast to previous works, we directly predict alignment parameters and shape embeddings. We achieve high-quality shape retrievals by learning CAD embeddings in a contrastive learning framework and distilling those into FastCAD. Our single-stage method accelerates the inference time by a factor of 50 compared to other methods operating on RGB-D scans while outperforming them on the challenging Scan2CAD alignment benchmark. Further, our approach collaborates seamlessly with online 3D reconstruction techniques. This enables the real-time generation of precise CAD model-based reconstructions from videos at 10 FPS. Doing so, we significantly improve the Scan2CAD alignment accuracy in the video setting from 43.0% to 48.2% and the reconstruction accuracy from 22.9% to 29.6%.
PVP: Personalized Video Prior for Editable Dynamic Portraits using StyleGAN
Jun 29, 2023Portrait synthesis creates realistic digital avatars which enable users to interact with others in a compelling way. Recent advances in StyleGAN and its extensions have shown promising results in synthesizing photorealistic and accurate reconstruction of human faces. However, previous methods often focus on frontal face synthesis and most methods are not able to handle large head rotations due to the training data distribution of StyleGAN. In this work, our goal is to take as input a monocular video of a face, and create an editable dynamic portrait able to handle extreme head poses. The user can create novel viewpoints, edit the appearance, and animate the face. Our method utilizes pivotal tuning inversion (PTI) to learn a personalized video prior from a monocular video sequence. Then we can input pose and expression coefficients to MLPs and manipulate the latent vectors to synthesize different viewpoints and expressions of the subject. We also propose novel loss functions to further disentangle pose and expression in the latent space. Our algorithm shows much better performance over previous approaches on monocular video datasets, and it is also capable of running in real-time at 54 FPS on an RTX 3080.
DIREG3D: DIrectly REGress 3D Hands from Multiple Cameras
Jan 26, 2022In this paper, we present DIREG3D, a holistic framework for 3D Hand Tracking. The proposed framework is capable of utilizing camera intrinsic parameters, 3D geometry, intermediate 2D cues, and visual information to regress parameters for accurately representing a Hand Mesh model. Our experiments show that information like the size of the 2D hand, its distance from the optical center, and radial distortion is useful for deriving highly reliable 3D poses in camera space from just monocular information. Furthermore, we extend these results to a multi-view camera setup by fusing features from different viewpoints.
An End-to-End System for Crowdsourced 3d Maps for Autonomous Vehicles: The Mapping Component
Mar 31, 2017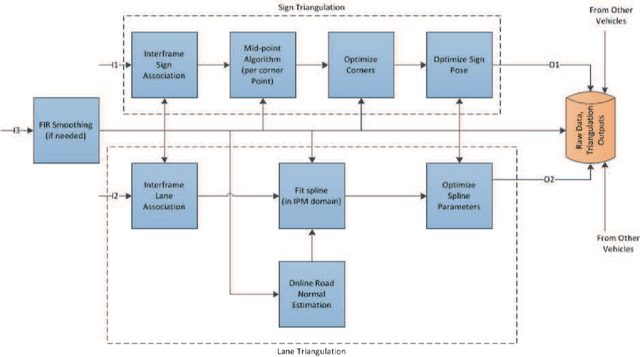
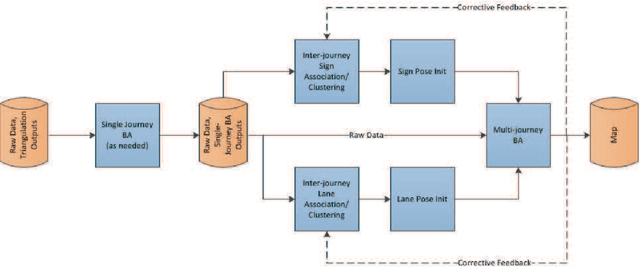
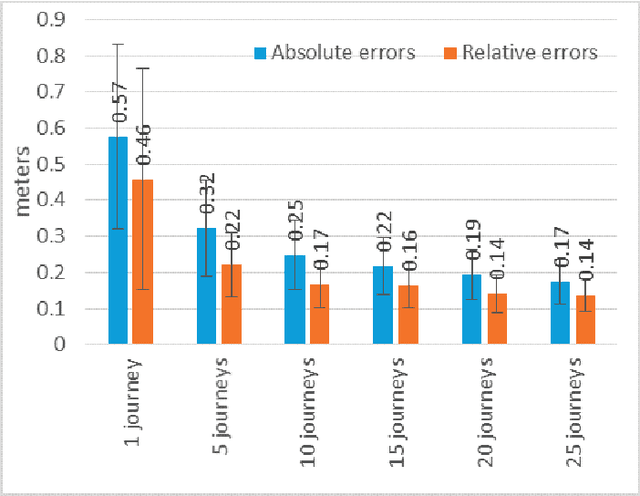
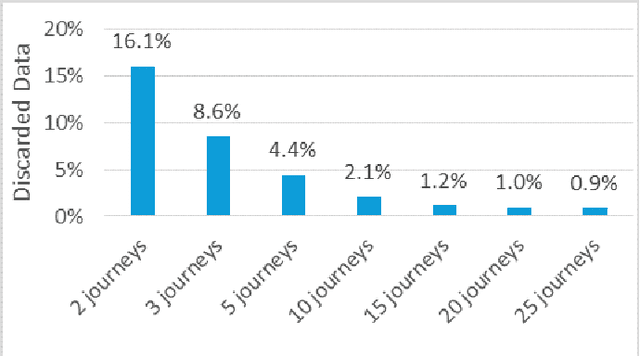
Autonomous vehicles rely on precise high definition (HD) 3d maps for navigation. This paper presents the mapping component of an end-to-end system for crowdsourcing precise 3d maps with semantically meaningful landmarks such as traffic signs (6 dof pose, shape and size) and traffic lanes (3d splines). The system uses consumer grade parts, and in particular, relies on a single front facing camera and a consumer grade GPS. Using real-time sign and lane triangulation on-device in the vehicle, with offline sign/lane clustering across multiple journeys and offline Bundle Adjustment across multiple journeys in the backend, we construct maps with mean absolute accuracy at sign corners of less than 20 cm from 25 journeys. To the best of our knowledge, this is the first end-to-end HD mapping pipeline in global coordinates in the automotive context using cost effective sensors.
Improved RANSAC performance using simple, iterative minimal-set solvers
Jul 08, 2010
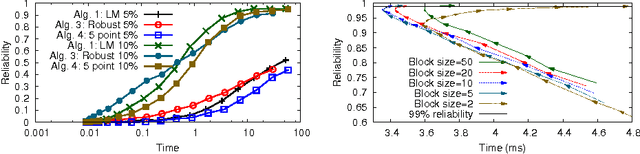

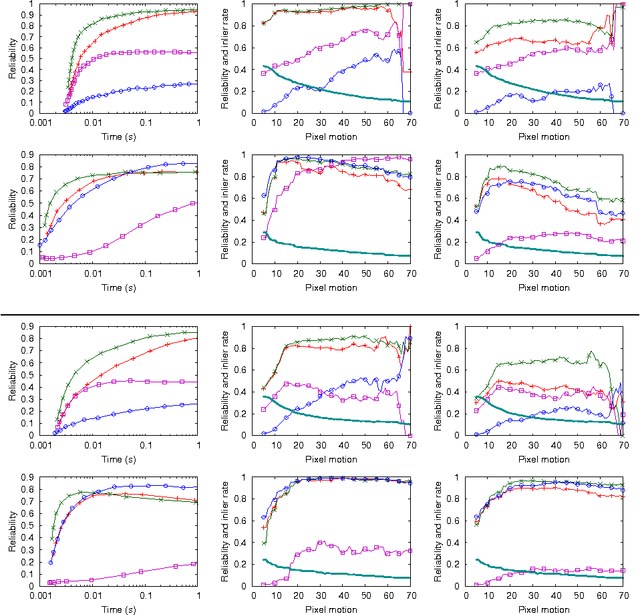
RANSAC is a popular technique for estimating model parameters in the presence of outliers. The best speed is achieved when the minimum possible number of points is used to estimate hypotheses for the model. Many useful problems can be represented using polynomial constraints (for instance, the determinant of a fundamental matrix must be zero) and so have a number of solutions which are consistent with a minimal set. A considerable amount of effort has been expended on finding the constraints of such problems, and these often require the solution of systems of polynomial equations. We show that better performance can be achieved by using a simple optimization based approach on minimal sets. For a given minimal set, the optimization approach is not guaranteed to converge to the correct solution. However, when used within RANSAC the greater speed and numerical stability results in better performance overall, and much simpler algorithms. We also show that by selecting more than the minimal number of points and using robust optimization can yield better results for very noisy by reducing the number of trials required. The increased speed of our method demonstrated with experiments on essential matrix estimation.