 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural-language-driven Simulation Benchmark and Copilot for Efficient Production of Object Interactions in Virtual Road Scenes
Dec 15, 2023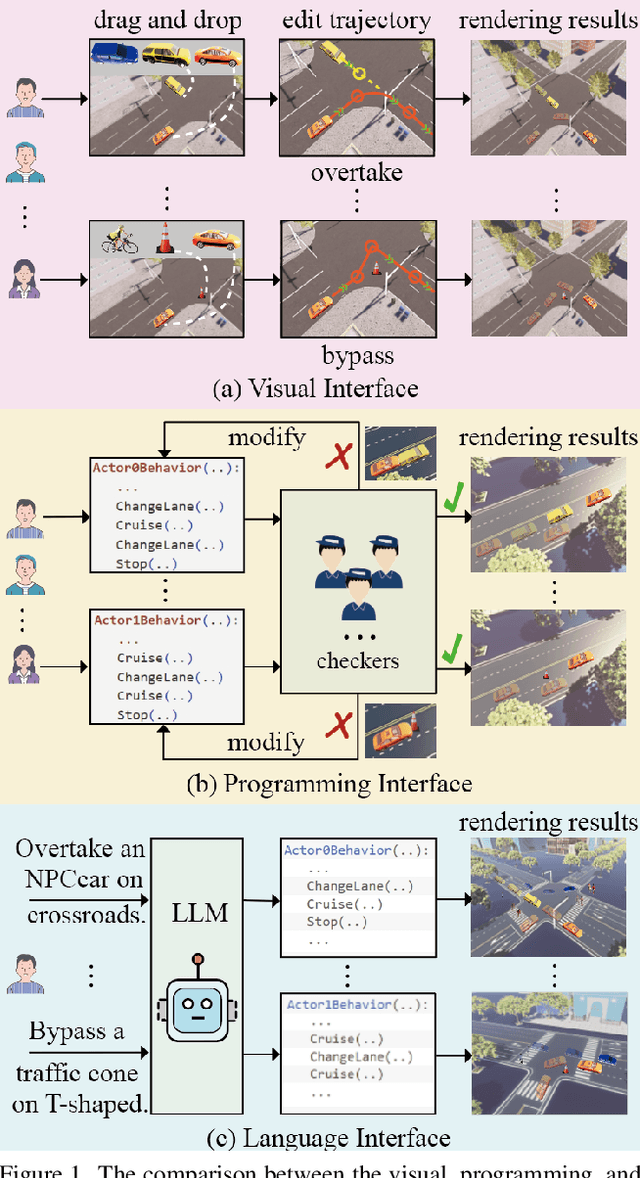
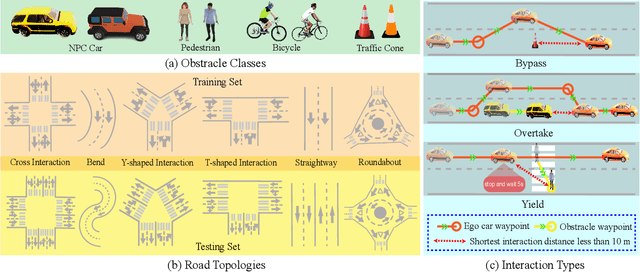

We advocate the idea of the natural-language-driven(NLD) simulation to efficiently produce the object interactions between multiple objects in the virtual road scenes, for teaching and testing the autonomous driving systems that should take quick action to avoid collision with obstacles with unpredictable motions. The NLD simulation allows the brief natural-language description to control the object interactions, significantly reducing the human efforts for creating a large amount of interaction data. To facilitate the research of NLD simulation, we collect the Language-to-Interaction(L2I) benchmark dataset with 120,000 natural-language descriptions of object interactions in 6 common types of road topologies. Each description is associated with the programming code, which the graphic render can use to visually reconstruct the object interactions in the virtual scenes. As a methodology contribution, we design SimCopilot to translate the interaction descriptions to the renderable code. We use the L2I dataset to evaluate SimCopilot's abilities to control the object motions, generate complex interactions, and generalize interactions across road topologies. The L2I dataset and the evaluation results motivate the relevant research of the NLD simulation.
FLYOVER: A Model-Driven Method to Generate Diverse Highway Interchanges for Autonomous Vehicle Testing
Jan 30, 2023



It has become a consensus that autonomous vehicles (AVs) will first be widely deployed on highways. However, the complexity of highway interchanges becomes the bottleneck for deploying AVs. An AV should be sufficiently tested under different highway interchanges, which is still challenging due to the lack of available datasets containing diverse highway interchanges. In this paper, we propose a model-driven method, FLYOVER, to generate a dataset consisting of diverse interchanges with measurable diversity coverage. First, FLYOVER proposes a labeled digraph to model the topology of an interchange. Second, FLYOVER takes real-world interchanges as input to guarantee topology practicality and extracts different topology equivalence classes by classifying the corresponding topology models. Third, for each topology class, FLYOVER identifies the corresponding geometrical features for the ramps and generates concrete interchanges using k-way combinatorial coverage and differential evolution. To illustrate the diversity and applicability of the generated interchange dataset, we test the built-in traffic flow control algorithm in SUMO and the fuel-optimization trajectory tracking algorithm deployed to Alibaba's autonomous trucks on the dataset. The results show that except for the geometrical difference, the interchanges are diverse in throughput and fuel consumption under the traffic flow control and trajectory tracking algorithms, respectively.