 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
SonoGym: High Performance Simulation for Challenging Surgical Tasks with Robotic Ultrasound
Jul 01, 2025Ultrasound (US) is a widely used medical imaging modality due to its real-time capabilities, non-invasive nature, and cost-effectiveness. Robotic ultrasound can further enhance its utility by reducing operator dependence and improving access to complex anatomical regions. For this, while deep reinforcement learning (DRL) and imitation learning (IL) have shown potential for autonomous navigation, their use in complex surgical tasks such as anatomy reconstruction and surgical guidance remains limited -- largely due to the lack of realistic and efficient simulation environments tailored to these tasks. We introduce SonoGym, a scalable simulation platform for complex robotic ultrasound tasks that enables parallel simulation across tens to hundreds of environments. Our framework supports realistic and real-time simulation of US data from CT-derived 3D models of the anatomy through both a physics-based and a generative modeling approach. Sonogym enables the training of DRL and recent IL agents (vision transformers and diffusion policies) for relevant tasks in robotic orthopedic surgery by integrating common robotic platforms and orthopedic end effectors. We further incorporate submodular DRL -- a recent method that handles history-dependent rewards -- for anatomy reconstruction and safe reinforcement learning for surgery. Our results demonstrate successful policy learning across a range of scenarios, while also highlighting the limitations of current methods in clinically relevant environments. We believe our simulation can facilitate research in robot learning approaches for such challenging robotic surgery applications. Dataset, codes, and videos are publicly available at https://sonogym.github.io/.
Creating a Digital Twin of Spinal Surgery: A Proof of Concept
Mar 25, 2024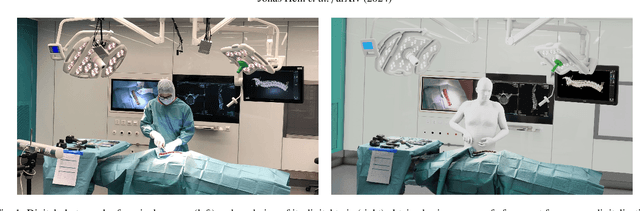
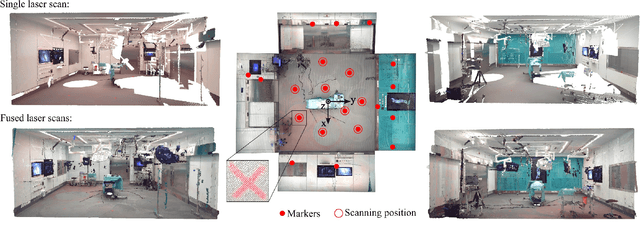
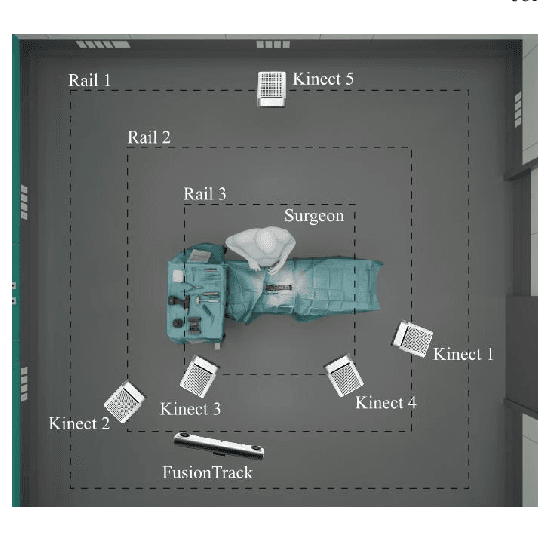
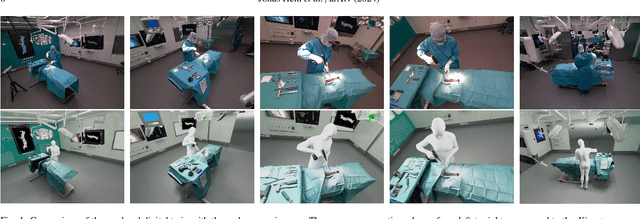
Surgery digitalization is the process of creating a virtual replica of real-world surgery, also referred to as a surgical digital twin (SDT). It has significant applications in various fields such as education and training, surgical planning, and automation of surgical tasks. Given their detailed representations of surgical procedures, SDTs are an ideal foundation for machine learning methods, enabling automatic generation of training data. In robotic surgery, SDTs can provide realistic virtual environments in which robots may learn through trial and error. In this paper, we present a proof of concept (PoC) for surgery digitalization that is applied to an ex-vivo spinal surgery performed in realistic conditions. The proposed digitalization focuses on the acquisition and modelling of the geometry and appearance of the entire surgical scene. We employ five RGB-D cameras for dynamic 3D reconstruction of the surgeon, a high-end camera for 3D reconstruction of the anatomy, an infrared stereo camera for surgical instrument tracking, and a laser scanner for 3D reconstruction of the operating room and data fusion. We justify the proposed methodology, discuss the challenges faced and further extensions of our prototype. While our PoC partially relies on manual data curation, its high quality and great potential motivate the development of automated methods for the creation of SDTs. The quality of our SDT can be assessed in a rendered video available at https://youtu.be/LqVaWGgaTMY .
A Review of Surface Haptics:Enabling Tactile Effects on Touch Surfaces
Apr 28, 2020
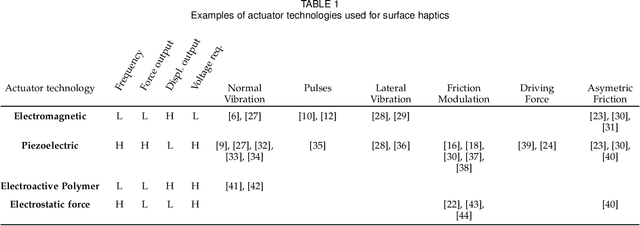

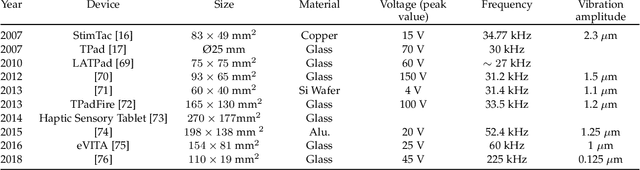
We review the current technology underlying surface haptics that converts passive touch surfaces to active ones (machine haptics), our perception of tactile stimuli displayed through active touch surfaces (human haptics), their potential applications (human-machine interaction), and finally the challenges ahead of us in making them available through commercial systems. This review primarily covers the tactile interactions of human fingers or hands with surface-haptics displays by focusing on the three most popular actuation methods: vibrotactile, electrostatic, and ultrasonic.