 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Map Completeness in Robot Exploration
Jun 19, 2024In this paper, we propose a method that, given a partial grid map of an indoor environment built by an autonomous mobile robot, estimates the amount of the explored area represented in the map, as well as whether the uncovered part is still worth being explored or not. Our method is based on a deep convolutional neural network trained on data from partially explored environments with annotations derived from the knowledge of the entire map (which is not available when the network is used for inference). We show how such a network can be used to define a stopping criterion to terminate the exploration process when it is no longer adding relevant details about the environment to the map, saving, on average, 40% of the total exploration time with respect to covering all the area of the environment.
Robust Multi-Agent Pickup and Delivery with Delays
Mar 30, 2023



Multi-Agent Pickup and Delivery (MAPD) is the problem of computing collision-free paths for a group of agents such that they can safely reach delivery locations from pickup ones. These locations are provided at runtime, making MAPD a combination between classical Multi-Agent Path Finding (MAPF) and online task assignment. Current algorithms for MAPD do not consider many of the practical issues encountered in real applications: real agents often do not follow the planned paths perfectly, and may be subject to delays and failures. In this paper, we study the problem of MAPD with delays, and we present two solution approaches that provide robustness guarantees by planning paths that limit the effects of imperfect execution. In particular, we introduce two algorithms, k-TP and p-TP, both based on a decentralized algorithm typically used to solve MAPD, Token Passing (TP), which offer deterministic and probabilistic guarantees, respectively. Experimentally, we compare our algorithms against a version of TP enriched with online replanning. k-TP and p-TP provide robust solutions, significantly reducing the number of replans caused by delays, with little or no increase in solution cost and running time.
Robust Structure Identification and Room Segmentation of Cluttered Indoor Environments from Occupancy Grid Maps
Mar 07, 2022
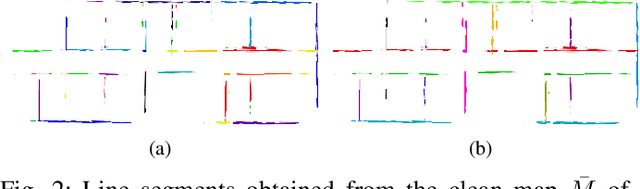
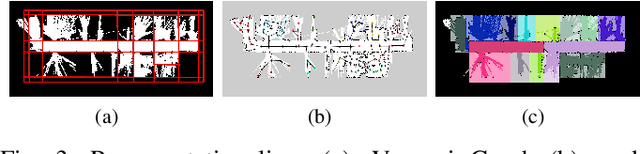

Identifying the environment's structure, i.e., to detect core components as rooms and walls, can facilitate several tasks fundamental for the successful operation of indoor autonomous mobile robots, including semantic environment understanding. These robots often rely on 2D occupancy maps for core tasks such as localisation and motion and task planning. However, reliable identification of structure and room segmentation from 2D occupancy maps is still an open problem due to clutter (e.g., furniture and movable object), occlusions, and partial coverage. We propose a method for the RObust StructurE identification and ROom SEgmentation (ROSE^2 ) of 2D occupancy maps, which may be cluttered and incomplete. ROSE^2 identifies the main directions of walls and is resilient to clutter and partial observations, allowing to extract a clean, abstract geometrical floor-plan-like description of the environment, which is used to segment, i.e., to identify rooms in, the original occupancy grid map. ROSE^2 is tested in several real-world publicly-available cluttered maps obtained in different conditions. The results show how it can robustly identify the environment structure in 2D occupancy maps suffering from clutter and partial observations, while significantly improving room segmentation accuracy. Thanks to the combination of clutter removal and robust room segmentation ROSE^2 consistently achieves higher performance than the state-of-the-art methods, against which it is compared.
Predicting Performance of SLAM Algorithms
Sep 06, 2021



Among the abilities that autonomous mobile robots should exhibit, map building and localization are definitely recognized as fundamental. Consequently, countless algorithms for solving the Simultaneous Localization And Mapping (SLAM) problem have been proposed. Currently, their evaluation is performed ex-post, according to outcomes obtained when running the algorithms on data collected by robots in real or simulated environments. In this paper, we present a novel method that allows the ex-ante prediction of the performance of a SLAM algorithm in an unseen environment, before it is actually run. Our method collects the performance of a SLAM algorithm in a number of simulated environments, builds a model that represents the relationship between the observed performance and some geometrical features of the environments, and exploits such model to predict the performance of the algorithm in an unseen environment starting from its features.
Exploration of Indoor Environments Predicting the Layout of Partially Observed Rooms
Apr 15, 2020



We consider exploration tasks in which an autonomous mobile robot incrementally builds maps of initially unknown indoor environments. In such tasks, the robot makes a sequence of decisions on where to move next that, usually, are based on knowledge about the observed parts of the environment. In this paper, we present an approach that exploits a prediction of the geometric structure of the unknown parts of an environment to improve exploration performance. In particular, we leverage an existing method that reconstructs the layout of an environment starting from a partial grid map and that predicts the shape of partially observed rooms on the basis of geometric features representing the regularities of the indoor environment. Then, we originally employ the predicted layout to estimate the amount of new area the robot would observe from candidate locations in order to inform the selection of the next best location and to early stop the exploration when no further relevant area is expected to be discovered. Experimental activities show that our approach is able to effectively predict the layout of partially observed rooms and to use such knowledge to speed up the exploration.
Multirobot Coverage of Linear Modular Environments
Jan 09, 2020
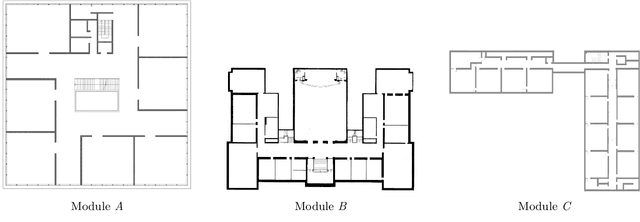


Multirobot systems for covering environments are increasingly used in applications like cleaning, industrial inspection, patrolling, and precision agriculture. The problem of covering a given environment using multiple robots can be naturally formulated and studied as a multi-Traveling Salesperson Problem (mTSP). In a mTSP, the environment is represented as a graph and the goal is to find tours (starting and ending at the same depot) for the robots in order to visit all the vertices with minimum global cost, namely the length of the longest tour. The mTSP is an NP-hard problem for which several approximation algorithms have been proposed. These algorithms usually assume generic environments, but tighter approximation bounds can be reached focusing on specific environments. In this paper, we address the case of environments composed of sub-parts, called modules, that can be reached from each other only through some linking structures. Examples are multi-floor buildings, in which the modules are the floors and the linking structures are the staircases or the elevators, and floors of large hotels or hospitals, in which the modules are the rooms and the linking structures are the corridors. We focus on linear modular environments, with the modules organized sequentially, presenting an efficient (with polynomial worst-case time complexity) algorithm that finds a solution for the mTSP whose cost is within a bounded distance from the cost of the optimal solution. The main idea of our algorithm is to allocate disjoint "blocks" of adjacent modules to the robots, in such a way that each module is covered by only one robot. We experimentally compare our algorithm against some state-of-the-art algorithms for solving mTSPs in generic environments and show that it is able to provide solutions with lower makespan and spending a computing time several orders of magnitude shorter.
A Next-Best-Smell Approach for Remote Gas Detection with a Mobile Robot
Jan 21, 2018

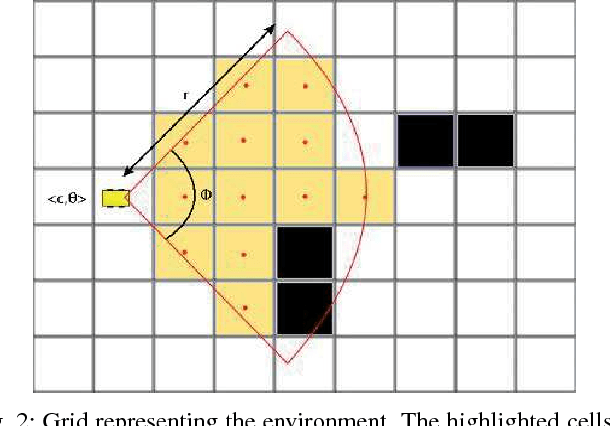

The problem of gas detection is relevant to many real-world applications, such as leak detection in industrial settings and landfill monitoring. Using mobile robots for gas detection has several advantages and can reduce danger for humans. In our work, we address the problem of planning a path for a mobile robotic platform equipped with a remote gas sensor, which minimizes the time to detect all gas sources in a given environment. We cast this problem as a coverage planning problem by defining a basic sensing operation -- a scan with the remote gas sensor -- as the field of "view" of the sensor. Given the computing effort required by previously proposed offline approaches, in this paper we suggest a online coverage algorithm, called Next-Best-Smell, adapted from the Next-Best-View class of exploration algorithms. Our algorithm evaluates candidate locations with a global utility function, which combines utility values for travel distance, information gain, and sensing time, using Multi-Criteria Decision Making. In our experiments, conducted both in simulation and with a real robot, we found the performance of the Next-Best-Smell approach to be comparable with that of the state-of-the-art offline algorithm, at much lower computational cost.