 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Next-Best-Smell Approach for Remote Gas Detection with a Mobile Robot
Paper and Code
Jan 21, 2018

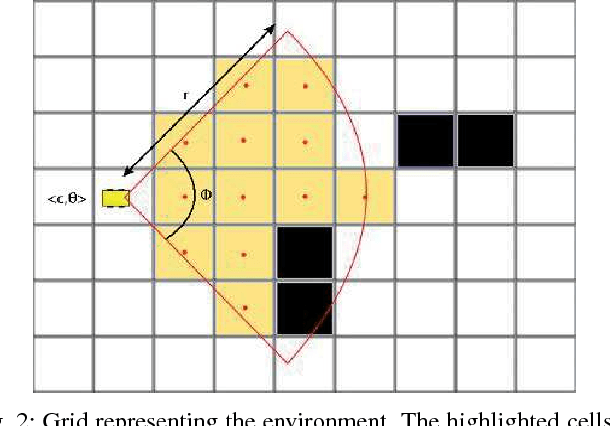

The problem of gas detection is relevant to many real-world applications, such as leak detection in industrial settings and landfill monitoring. Using mobile robots for gas detection has several advantages and can reduce danger for humans. In our work, we address the problem of planning a path for a mobile robotic platform equipped with a remote gas sensor, which minimizes the time to detect all gas sources in a given environment. We cast this problem as a coverage planning problem by defining a basic sensing operation -- a scan with the remote gas sensor -- as the field of "view" of the sensor. Given the computing effort required by previously proposed offline approaches, in this paper we suggest a online coverage algorithm, called Next-Best-Smell, adapted from the Next-Best-View class of exploration algorithms. Our algorithm evaluates candidate locations with a global utility function, which combines utility values for travel distance, information gain, and sensing time, using Multi-Criteria Decision Making. In our experiments, conducted both in simulation and with a real robot, we found the performance of the Next-Best-Smell approach to be comparable with that of the state-of-the-art offline algorithm, at much lower computational cost.