 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYUBI: Yielding Universal Bidigital Interface for Bimanual Dexterous Manipulation at Scale
Jun 08, 2026We introduce Yielding Universal Bidigital Interface (YUBI), a finger-aligned gripper designed to enable intuitive, ergonomic, and scalable data collection for bimanual dexterous manipulation. While handheld data collection systems such as Universal Manipulation Interface (UMI) enable affordable data collection, their bulky pistol-grip designs can pose ergonomic and usability challenges for fine-grained, dexterous manipulation tasks. To address this, YUBI presents a distinct design principle: yielding, finger-driven actuation that directly maps human finger movements to gripper jaw motion. Using the YUBI devices, we set up a data collection system with integrated VR-based 6 DoF tracking of the gripper, ensuring high-fidelity trajectory data acquisition. We curate a UMI-based dataset of unprecedented scale: 8,434 hours across 1.20M episodes and 119 tasks. Experiments show that YUBI offers advantages over the UMI gripper in versatility for complex bimanual tasks, dexterity, and operational efficiency. A single policy trained on the YUBI dataset transfers across multiple bimanual robots (UR, Franka, and ELEY) simply by mounting the gripper on each platform, confirming that the collected data are directly executable as policy supervision. We release the gripper hardware, data-collection software, and dataset as one integrated stack, offering the open community a reproducible path to large-scale data acquisition for advancing robotic foundation models.
A Flexible Field-Based Policy Learning Framework for Diverse Robotic Systems and Sensors
Dec 22, 2025We present a cross robot visuomotor learning framework that integrates diffusion policy based control with 3D semantic scene representations from D3Fields to enable category level generalization in manipulation. Its modular design supports diverse robot camera configurations including UR5 arms with Microsoft Azure Kinect arrays and bimanual manipulators with Intel RealSense sensors through a low latency control stack and intuitive teleoperation. A unified configuration layer enables seamless switching between setups for flexible data collection training and evaluation. In a grasp and lift block task the framework achieved an 80 percent success rate after only 100 demonstration episodes demonstrating robust skill transfer between platforms and sensing modalities. This design paves the way for scalable real world studies in cross robotic generalization.
Learning Bimanual Manipulation via Action Chunking and Inter-Arm Coordination with Transformers
Mar 18, 2025Robots that can operate autonomously in a human living environment are necessary to have the ability to handle various tasks flexibly. One crucial element is coordinated bimanual movements that enable functions that are difficult to perform with one hand alone. In recent years, learning-based models that focus on the possibilities of bimanual movements have been proposed. However, the high degree of freedom of the robot makes it challenging to reason about control, and the left and right robot arms need to adjust their actions depending on the situation, making it difficult to realize more dexterous tasks. To address the issue, we focus on coordination and efficiency between both arms, particularly for synchronized actions. Therefore, we propose a novel imitation learning architecture that predicts cooperative actions. We differentiate the architecture for both arms and add an intermediate encoder layer, Inter-Arm Coordinated transformer Encoder (IACE), that facilitates synchronization and temporal alignment to ensure smooth and coordinated actions. To verify the effectiveness of our architectures, we perform distinctive bimanual tasks. The experimental results showed that our model demonstrated a high success rate for comparison and suggested a suitable architecture for the policy learning of bimanual manipulation.
Visual Imitation Learning of Non-Prehensile Manipulation Tasks with Dynamics-Supervised Models
Oct 25, 2024Unlike quasi-static robotic manipulation tasks like pick-and-place, dynamic tasks such as non-prehensile manipulation pose greater challenges, especially for vision-based control. Successful control requires the extraction of features relevant to the target task. In visual imitation learning settings, these features can be learnt by backpropagating the policy loss through the vision backbone. Yet, this approach tends to learn task-specific features with limited generalizability. Alternatively, learning world models can realize more generalizable vision backbones. Utilizing the learnt features, task-specific policies are subsequently trained. Commonly, these models are trained solely to predict the next RGB state from the current state and action taken. But only-RGB prediction might not fully-capture the task-relevant dynamics. In this work, we hypothesize that direct supervision of target dynamic states (Dynamics Mapping) can learn better dynamics-informed world models. Beside the next RGB reconstruction, the world model is also trained to directly predict position, velocity, and acceleration of environment rigid bodies. To verify our hypothesis, we designed a non-prehensile 2D environment tailored to two tasks: "Balance-Reaching" and "Bin-Dropping". When trained on the first task, dynamics mapping enhanced the task performance under different training configurations (Decoupled, Joint, End-to-End) and policy architectures (Feedforward, Recurrent). Notably, its most significant impact was for world model pretraining boosting the success rate from 21% to 85%. Although frozen dynamics-informed world models could generalize well to a task with in-domain dynamics, but poorly to a one with out-of-domain dynamics.
PEGASUS: Physically Enhanced Gaussian Splatting Simulation System for 6DOF Object Pose Dataset Generation
Jan 04, 2024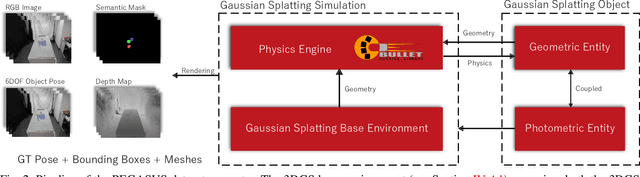


We introduce Physically Enhanced Gaussian Splatting Simulation System (PEGASUS) for 6DOF object pose dataset generation, a versatile dataset generator based on 3D Gaussian Splatting. Environment and object representations can be easily obtained using commodity cameras to reconstruct with Gaussian Splatting. PEGASUS allows the composition of new scenes by merging the respective underlying Gaussian Splatting point cloud of an environment with one or multiple objects. Leveraging a physics engine enables the simulation of natural object placement within a scene through interaction between meshes extracted for the objects and the environment. Consequently, an extensive amount of new scenes - static or dynamic - can be created by combining different environments and objects. By rendering scenes from various perspectives, diverse data points such as RGB images, depth maps, semantic masks, and 6DoF object poses can be extracted. Our study demonstrates that training on data generated by PEGASUS enables pose estimation networks to successfully transfer from synthetic data to real-world data. Moreover, we introduce the Ramen dataset, comprising 30 Japanese cup noodle items. This dataset includes spherical scans that captures images from both object hemisphere and the Gaussian Splatting reconstruction, making them compatible with PEGASUS.
NeuralLabeling: A versatile toolset for labeling vision datasets using Neural Radiance Fields
Sep 21, 2023



We present NeuralLabeling, a labeling approach and toolset for annotating a scene using either bounding boxes or meshes and generating segmentation masks, affordance maps, 2D bounding boxes, 3D bounding boxes, 6DOF object poses, depth maps and object meshes. NeuralLabeling uses Neural Radiance Fields (NeRF) as renderer, allowing labeling to be performed using 3D spatial tools while incorporating geometric clues such as occlusions, relying only on images captured from multiple viewpoints as input. To demonstrate the applicability of NeuralLabeling to a practical problem in robotics, we added ground truth depth maps to 30000 frames of transparent object RGB and noisy depth maps of glasses placed in a dishwasher captured using an RGBD sensor, yielding the Dishwasher30k dataset. We show that training a simple deep neural network with supervision using the annotated depth maps yields a higher reconstruction performance than training with the previously applied weakly supervised approach.
A Systematic Literature Review of Experiments in Socially Assistive Robotics using Humanoid Robots
Nov 15, 2017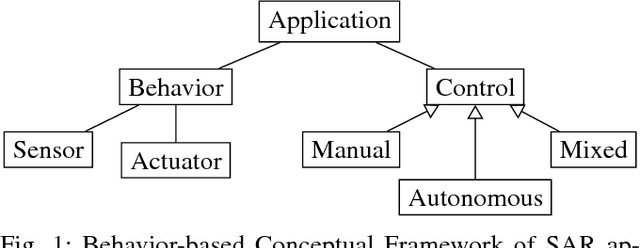

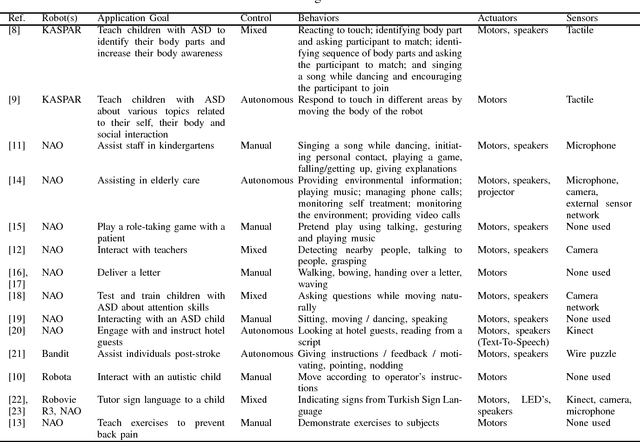
We perform a Systematic Literature Review to discover how Humanoid robots are being applied in Socially Assistive Robotics experiments. Our search returned 24 papers, from which 16 were included for closer analysis. To do this analysis we used a conceptual framework inspired by Behavior-based Robotics. We were interested in finding out which robot was used (most use the robot NAO), what the goals of the application were (teaching, assisting, playing, instructing), how the robot was controlled (manually in most of the experiments), what kind of behaviors the robot exhibited (reacting to touch, pointing at body parts, singing a song, dancing, among others), what kind of actuators the robot used (always motors, sometimes speakers, hardly ever any other type of actuator) and what kind of sensors the robot used (in many studies the robot did not use any sensors at all, in others the robot frequently used camera and/or microphone). The results of this study can be used for designing software frameworks targeting Humanoid Socially Assistive Robotics, especially in the context of Software Product Line Engineering projects.