 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePEGASUS: Physically Enhanced Gaussian Splatting Simulation System for 6DOF Object Pose Dataset Generation
Paper and Code
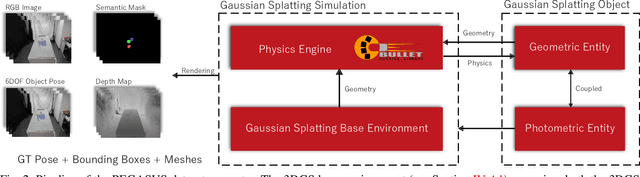


We introduce Physically Enhanced Gaussian Splatting Simulation System (PEGASUS) for 6DOF object pose dataset generation, a versatile dataset generator based on 3D Gaussian Splatting. Environment and object representations can be easily obtained using commodity cameras to reconstruct with Gaussian Splatting. PEGASUS allows the composition of new scenes by merging the respective underlying Gaussian Splatting point cloud of an environment with one or multiple objects. Leveraging a physics engine enables the simulation of natural object placement within a scene through interaction between meshes extracted for the objects and the environment. Consequently, an extensive amount of new scenes - static or dynamic - can be created by combining different environments and objects. By rendering scenes from various perspectives, diverse data points such as RGB images, depth maps, semantic masks, and 6DoF object poses can be extracted. Our study demonstrates that training on data generated by PEGASUS enables pose estimation networks to successfully transfer from synthetic data to real-world data. Moreover, we introduce the Ramen dataset, comprising 30 Japanese cup noodle items. This dataset includes spherical scans that captures images from both object hemisphere and the Gaussian Splatting reconstruction, making them compatible with PEGASUS.