 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Radar Ghost Dataset -- An Evaluation of Ghost Objects in Automotive Radar Data
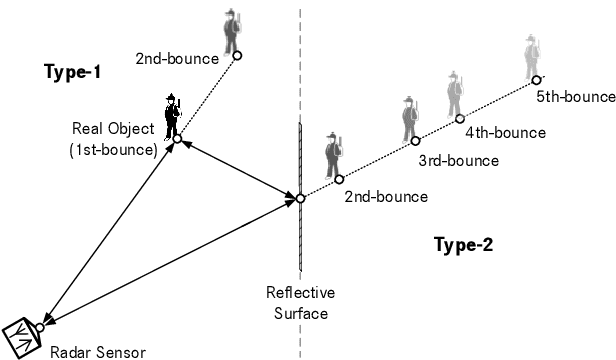
Apr 01, 2024Radar sensors have a long tradition in advanced driver assistance systems (ADAS) and also play a major role in current concepts for autonomous vehicles. Their importance is reasoned by their high robustness against meteorological effects, such as rain, snow, or fog, and the radar's ability to measure relative radial velocity differences via the Doppler effect. The cause for these advantages, namely the large wavelength, is also one of the drawbacks of radar sensors. Compared to camera or lidar sensor, a lot more surfaces in a typical traffic scenario appear flat relative to the radar's emitted signal. This results in multi-path reflections or so called ghost detections in the radar signal. Ghost objects pose a major source for potential false positive detections in a vehicle's perception pipeline. Therefore, it is important to be able to segregate multi-path reflections from direct ones. In this article, we present a dataset with detailed manual annotations for different kinds of ghost detections. Moreover, two different approaches for identifying these kinds of objects are evaluated. We hope that our dataset encourages more researchers to engage in the fields of multi-path object suppression or exploitation.
A Benchmark for Spray from Nearby Cutting Vehicles
Aug 24, 2021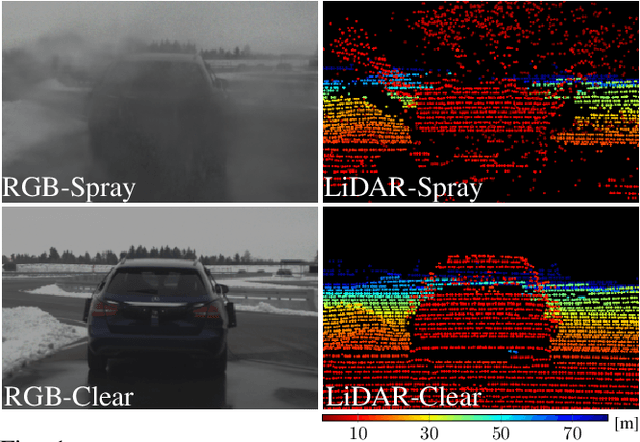
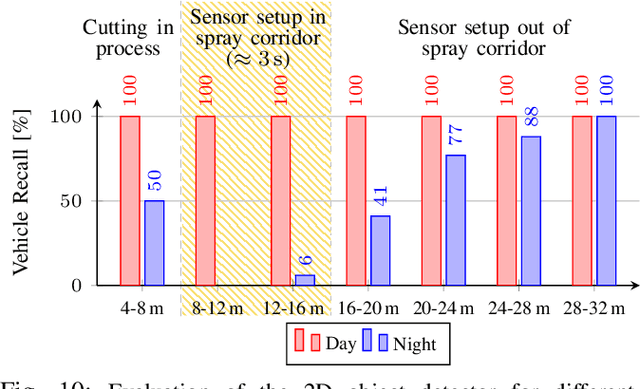
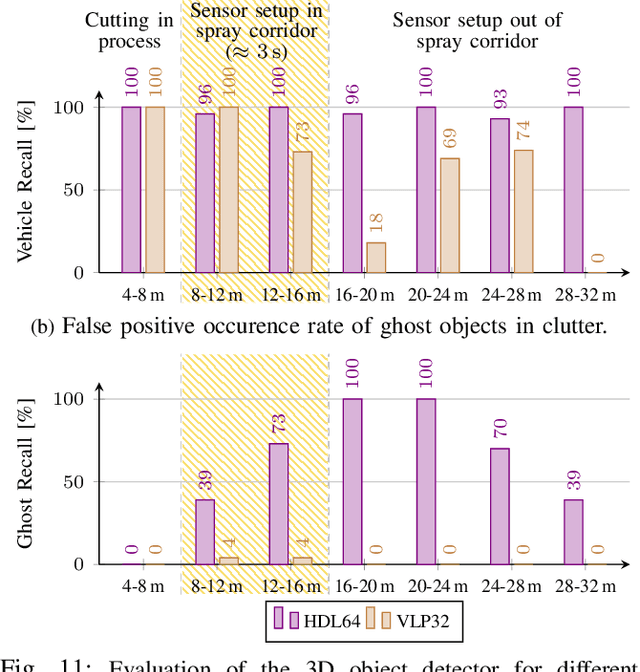
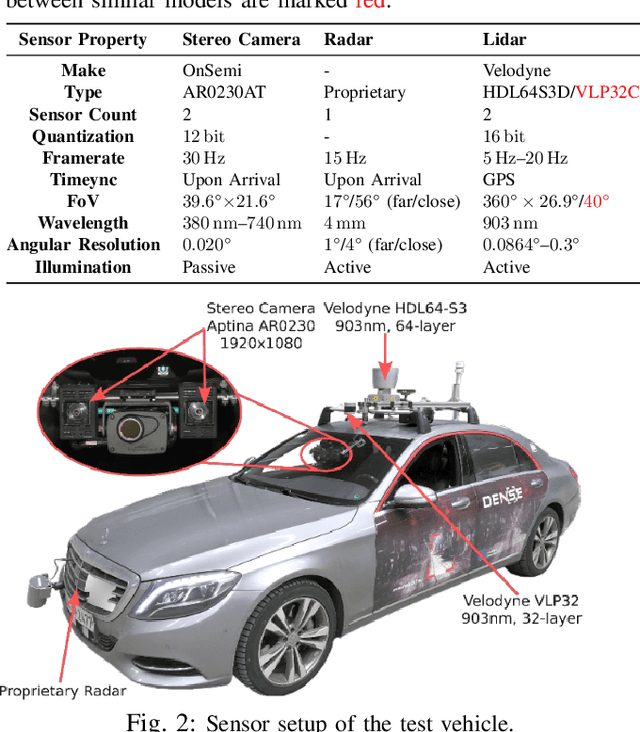
Current driver assistance systems and autonomous driving stacks are limited to well-defined environment conditions and geo fenced areas. To increase driving safety in adverse weather conditions, broadening the application spectrum of autonomous driving and driver assistance systems is necessary. In order to enable this development, reproducible benchmarking methods are required to quantify the expected distortions. In this publication, a testing methodology for disturbances from spray is presented. It introduces a novel lightweight and configurable spray setup alongside an evaluation scheme to assess the disturbances caused by spray. The analysis covers an automotive RGB camera and two different LiDAR systems, as well as downstream detection algorithms based on YOLOv3 and PV-RCNN. In a common scenario of a closely cutting vehicle, it is visible that the distortions are severely affecting the perception stack up to four seconds showing the necessity of benchmarking the influences of spray.
Using Machine Learning to Detect Ghost Images in Automotive Radar
Jul 10, 2020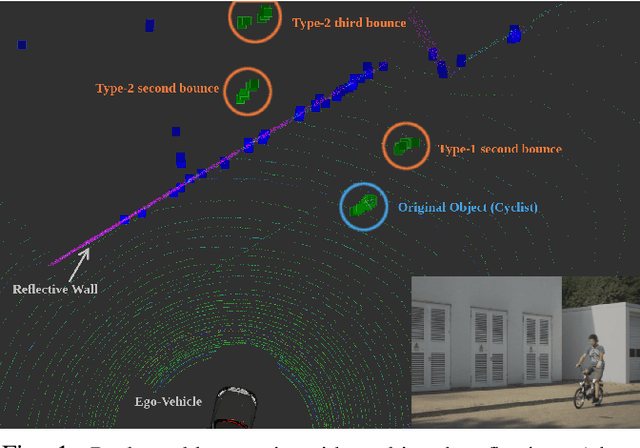
Radar sensors are an important part of driver assistance systems and intelligent vehicles due to their robustness against all kinds of adverse conditions, e.g., fog, snow, rain, or even direct sunlight. This robustness is achieved by a substantially larger wavelength compared to light-based sensors such as cameras or lidars. As a side effect, many surfaces act like mirrors at this wavelength, resulting in unwanted ghost detections. In this article, we present a novel approach to detect these ghost objects by applying data-driven machine learning algorithms. For this purpose, we use a large-scale automotive data set with annotated ghost objects. We show that we can use a state-of-the-art automotive radar classifier in order to detect ghost objects alongside real objects. Furthermore, we are able to reduce the amount of false positive detections caused by ghost images in some settings.
Off-the-shelf sensor vs. experimental radar -- How much resolution is necessary in automotive radar classification?
Jun 09, 2020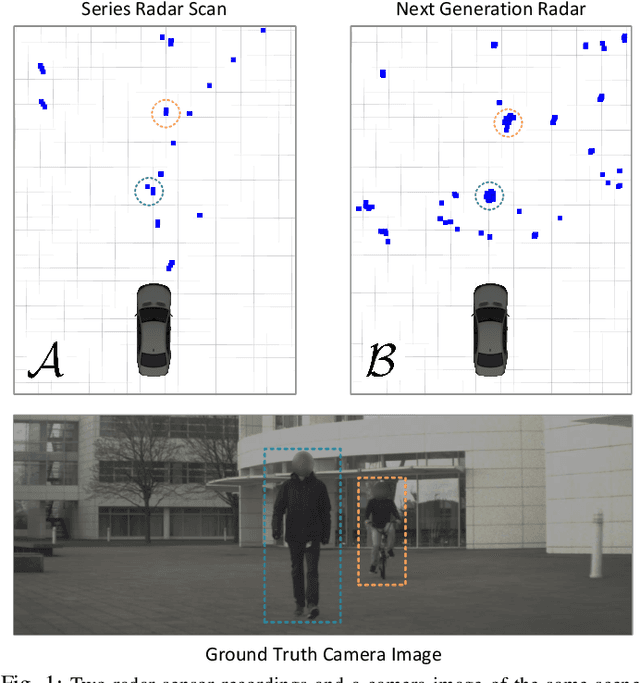
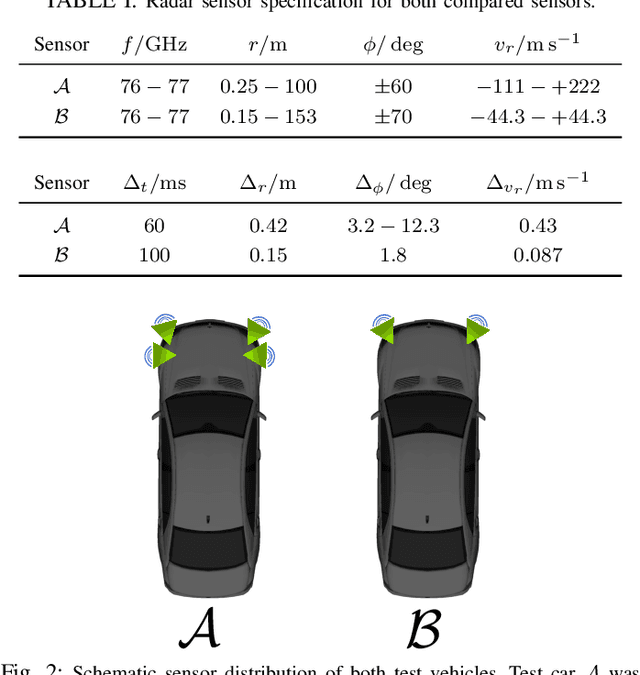
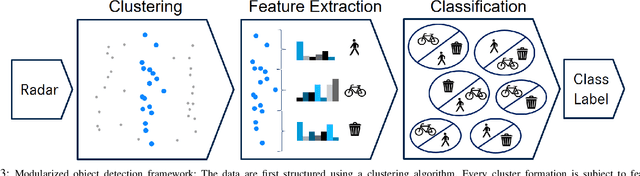
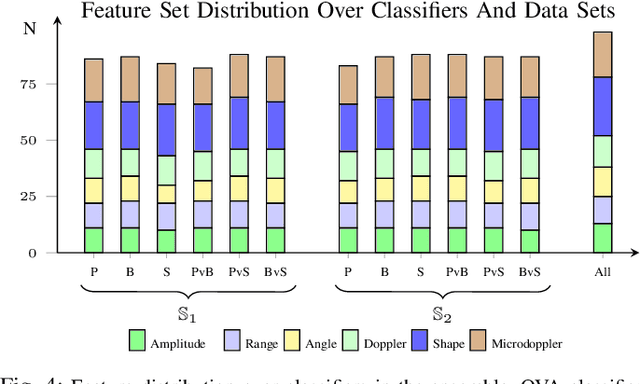
Radar-based road user detection is an important topic in the context of autonomous driving applications. The resolution of conventional automotive radar sensors results in a sparse data representation which is tough to refine during subsequent signal processing. On the other hand, a new sensor generation is waiting in the wings for its application in this challenging field. In this article, two sensors of different radar generations are evaluated against each other. The evaluation criterion is the performance on moving road user object detection and classification tasks. To this end, two data sets originating from an off-the-shelf radar and a high resolution next generation radar are compared. Special attention is given on how the two data sets are assembled in order to make them comparable. The utilized object detector consists of a clustering algorithm, a feature extraction module, and a recurrent neural network ensemble for classification. For the assessment, all components are evaluated both individually and, for the first time, as a whole. This allows for indicating where overall performance improvements have their origin in the pipeline. Furthermore, the generalization capabilities of both data sets are evaluated and important comparison metrics for automotive radar object detection are discussed. Results show clear benefits of the next generation radar. Interestingly, those benefits do not actually occur due to better performance at the classification stage, but rather because of the vast improvements at the clustering stage.
Seeing Around Street Corners: Non-Line-of-Sight Detection and Tracking In-the-Wild Using Doppler Radar
Dec 13, 2019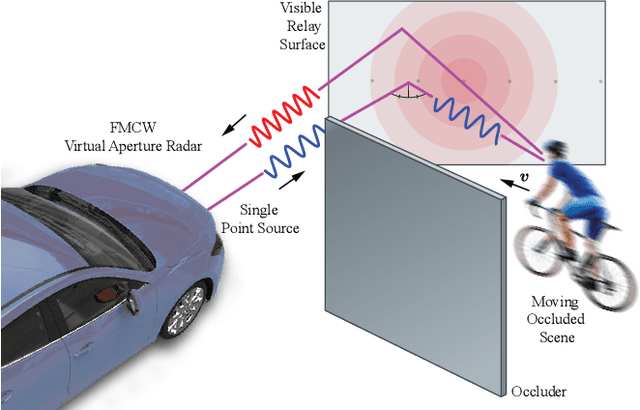
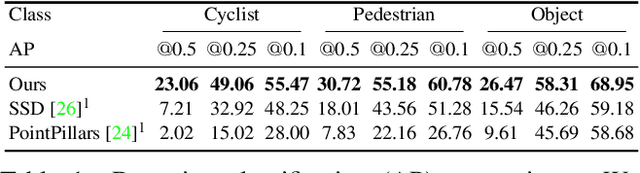
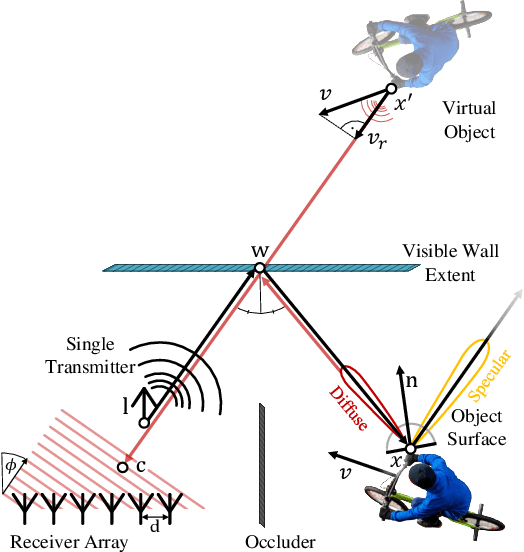
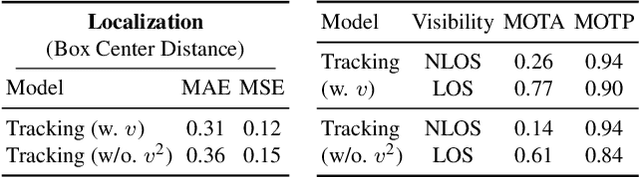
Conventional sensor systems record information about directly visible objects, whereas occluded scene components are considered lost in the measurement process. Nonline-of-sight (NLOS) methods try to recover such hidden objects from their indirect reflections - faint signal components, traditionally treated as measurement noise. Existing NLOS approaches struggle to record these low-signal components outside the lab, and do not scale to large-scale outdoor scenes and high-speed motion, typical in automotive scenarios. Especially optical NLOS is fundamentally limited by the quartic intensity falloff of diffuse indirect reflections. In this work, we depart from visible-wavelength approaches and demonstrate detection, classification, and tracking of hidden objects in large-scale dynamic scenes using a Doppler radar which can be foreseen as a low-cost serial product in the near future. To untangle noisy indirect and direct reflections, we learn from temporal sequences of Doppler velocity and position measurements, which we fuse in a joint NLOS detection and tracking network over time. We validate the approach on in-the-wild automotive scenes, including sequences of parked cars or house facades as indirect reflectors, and demonstrate low-cost, real-time NLOS in dynamic automotive environments.
Uncertainty Estimation in One-Stage Object Detection
May 24, 2019



Environment perception is the task for intelligent vehicles on which all subsequent steps rely. A key part of perception is to safely detect other road users such as vehicles, pedestrians, and cyclists. With modern deep learning techniques huge progress was made over the last years in this field. However such deep learning based object detection models cannot predict how certain they are in their predictions, potentially hampering the performance of later steps such as tracking or sensor fusion. We present a viable approaches to estimate uncertainty in an one-stage object detector, while improving the detection performance of the baseline approach. The proposed model is evaluated on a large scale automotive pedestrian dataset. Experimental results show that the uncertainty outputted by our system is coupled with detection accuracy and the occlusion level of pedestrians.