 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteering Prediction via a Multi-Sensor System for Autonomous Racing
Sep 28, 2024



Autonomous racing has rapidly gained research attention. Traditionally, racing cars rely on 2D LiDAR as their primary visual system. In this work, we explore the integration of an event camera with the existing system to provide enhanced temporal information. Our goal is to fuse the 2D LiDAR data with event data in an end-to-end learning framework for steering prediction, which is crucial for autonomous racing. To the best of our knowledge, this is the first study addressing this challenging research topic. We start by creating a multisensor dataset specifically for steering prediction. Using this dataset, we establish a benchmark by evaluating various SOTA fusion methods. Our observations reveal that existing methods often incur substantial computational costs. To address this, we apply low-rank techniques to propose a novel, efficient, and effective fusion design. We introduce a new fusion learning policy to guide the fusion process, enhancing robustness against misalignment. Our fusion architecture provides better steering prediction than LiDAR alone, significantly reducing the RMSE from 7.72 to 1.28. Compared to the second-best fusion method, our work represents only 11% of the learnable parameters while achieving better accuracy. The source code, dataset, and benchmark will be released to promote future research.
Hardware Neural Control of CartPole and F1TENTH Race Car
Jul 11, 2024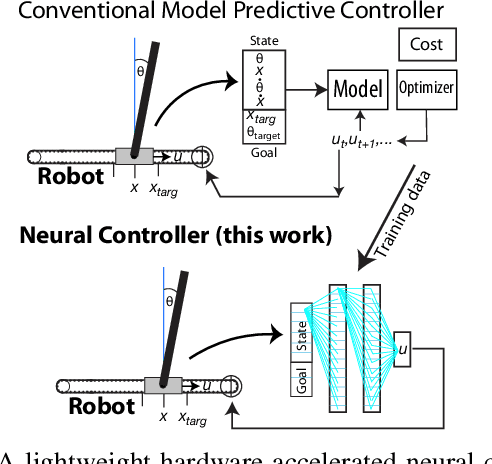
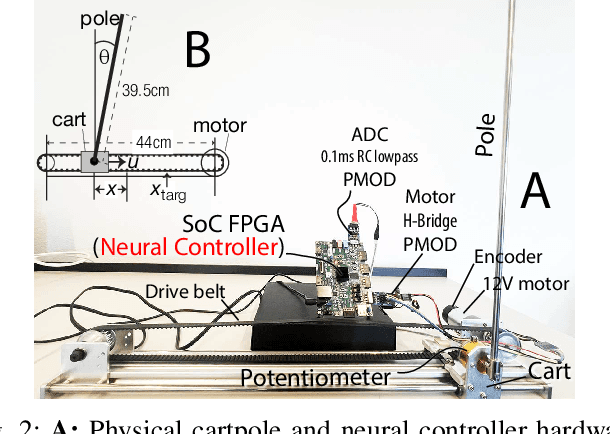
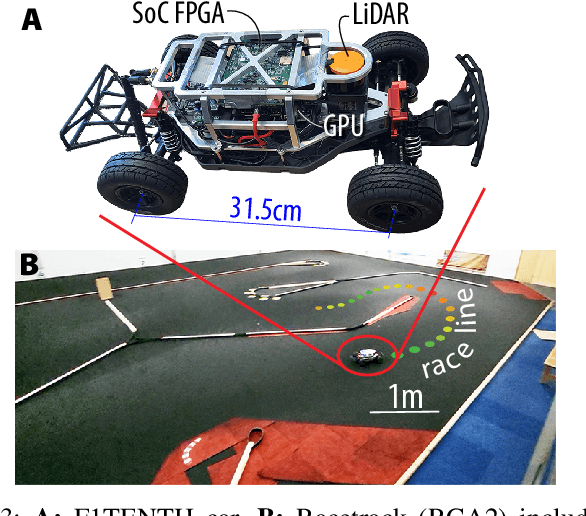
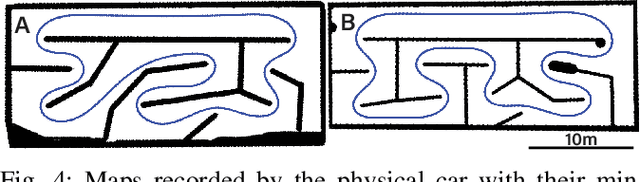
Nonlinear model predictive control (NMPC) has proven to be an effective control method, but it is expensive to compute. This work demonstrates the use of hardware FPGA neural network controllers trained to imitate NMPC with supervised learning. We use these Neural Controllers (NCs) implemented on inexpensive embedded FPGA hardware for high frequency control on physical cartpole and F1TENTH race car. Our results show that the NCs match the control performance of the NMPCs in simulation and outperform it in reality, due to the faster control rate that is afforded by the quick FPGA NC inference. We demonstrate kHz control rates for a physical cartpole and offloading control to the FPGA hardware on the F1TENTH car. Code and hardware implementation for this paper are available at https:// github.com/SensorsINI/Neural-Control-Tools.
Directed Beam Search: Plug-and-Play Lexically Constrained Language Generation
Dec 31, 2020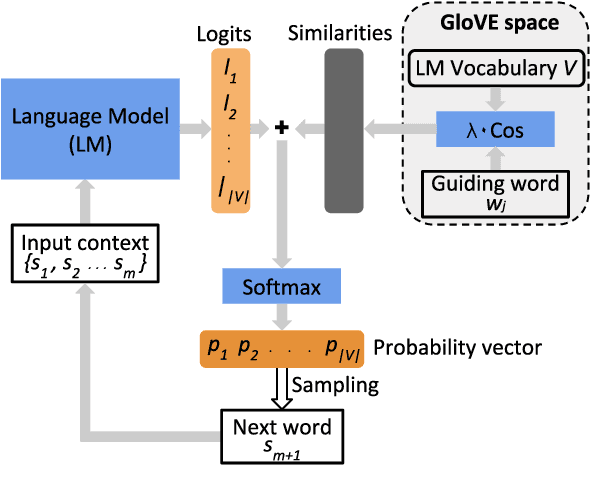
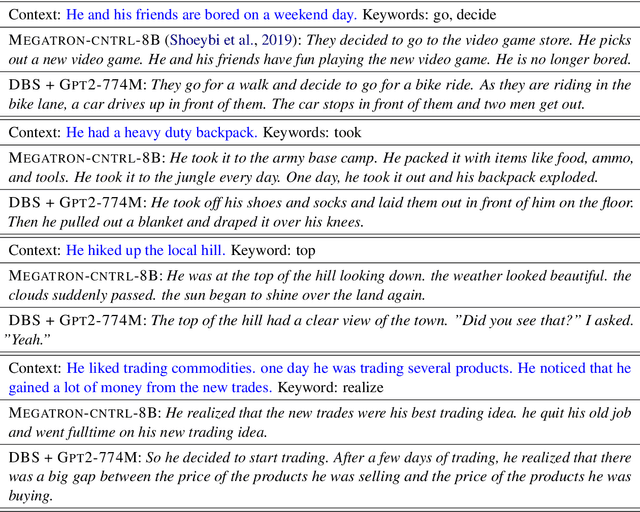
Large pre-trained language models are capable of generating realistic text. However, controlling these models so that the generated text satisfies lexical constraints, i.e., contains specific words, is a challenging problem. Given that state-of-the-art language models are too large to be trained from scratch in a manageable time, it is desirable to control these models without re-training them. Methods capable of doing this are called plug-and-play. Recent plug-and-play methods have been successful in constraining small bidirectional language models as well as forward models in tasks with a restricted search space, e.g., machine translation. However, controlling large transformer-based models to meet lexical constraints without re-training them remains a challenge. In this work, we propose Directed Beam Search (DBS), a plug-and-play method for lexically constrained language generation. Our method can be applied to any language model, is easy to implement and can be used for general language generation. In our experiments we use DBS to control GPT-2. We demonstrate its performance on keyword-to-phrase generation and we obtain comparable results as a state-of-the-art non-plug-and-play model for lexically constrained story generation.