 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware Neural Control of CartPole and F1TENTH Race Car
Paper and Code
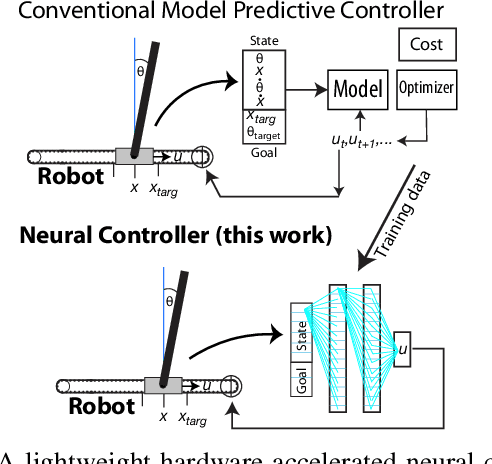
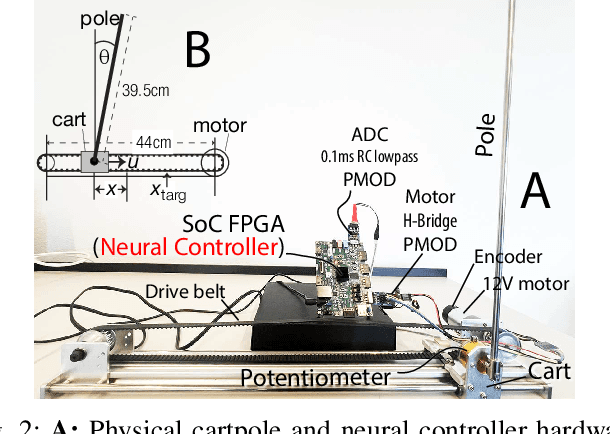
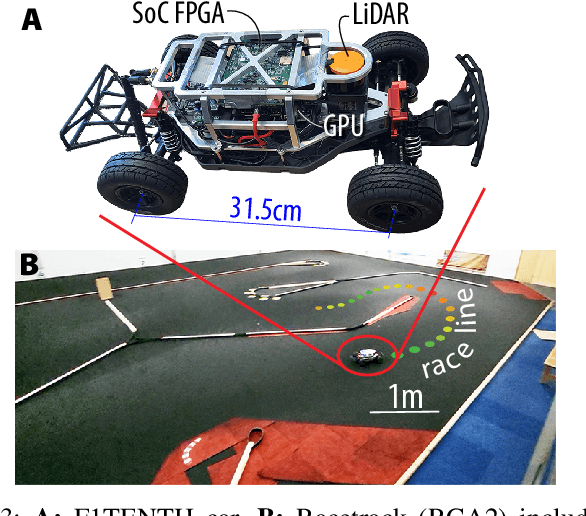
Nonlinear model predictive control (NMPC) has proven to be an effective control method, but it is expensive to compute. This work demonstrates the use of hardware FPGA neural network controllers trained to imitate NMPC with supervised learning. We use these Neural Controllers (NCs) implemented on inexpensive embedded FPGA hardware for high frequency control on physical cartpole and F1TENTH race car. Our results show that the NCs match the control performance of the NMPCs in simulation and outperform it in reality, due to the faster control rate that is afforded by the quick FPGA NC inference. We demonstrate kHz control rates for a physical cartpole and offloading control to the FPGA hardware on the F1TENTH car. Code and hardware implementation for this paper are available at https:// github.com/SensorsINI/Neural-Control-Tools.