 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTEMO: Early Spatio-temporal Forecasting with Multi-Objective Reinforcement Learning
Jun 18, 2024Accuracy and timeliness are indeed often conflicting goals in prediction tasks. Premature predictions may yield a higher rate of false alarms, whereas delaying predictions to gather more information can render them too late to be useful. In applications such as wildfires, crimes, and traffic jams, timely forecasting are vital for safeguarding human life and property. Consequently, finding a balance between accuracy and timeliness is crucial. In this paper, we propose an early spatio-temporal forecasting model based on Multi-Objective reinforcement learning that can either implement an optimal policy given a preference or infer the preference based on a small number of samples. The model addresses two primary challenges: 1) enhancing the accuracy of early forecasting and 2) providing the optimal policy for determining the most suitable prediction time for each area. Our method demonstrates superior performance on three large-scale real-world datasets, surpassing existing methods in early spatio-temporal forecasting tasks.
Spatio-temporal Early Prediction based on Multi-objective Reinforcement Learning
Jun 06, 2024Accuracy and timeliness are indeed often conflicting goals in prediction tasks. Premature predictions may yield a higher rate of false alarms, whereas delaying predictions to gather more information can render them too late to be useful. In applications such as wildfires, crimes, and traffic jams, timely predictions are vital for safeguarding human life and property. Consequently, finding a balance between accuracy and timeliness is crucial. In this paper, we propose a spatio-temporal early prediction model based on Multi-Objective reinforcement learning that can either implement an optimal policy given a preference or infer the preference based on a small number of samples. The model addresses two primary challenges: 1) enhancing the accuracy of early predictions and 2) providing the optimal policy for determining the most suitable prediction time for each area. Our method demonstrates superior performance on three large-scale real-world datasets, surpassing existing methods in early spatio-temporal prediction tasks.
i-Align: an interpretable knowledge graph alignment model
Aug 26, 2023Knowledge graphs (KGs) are becoming essential resources for many downstream applications. However, their incompleteness may limit their potential. Thus, continuous curation is needed to mitigate this problem. One of the strategies to address this problem is KG alignment, i.e., forming a more complete KG by merging two or more KGs. This paper proposes i-Align, an interpretable KG alignment model. Unlike the existing KG alignment models, i-Align provides an explanation for each alignment prediction while maintaining high alignment performance. Experts can use the explanation to check the correctness of the alignment prediction. Thus, the high quality of a KG can be maintained during the curation process (e.g., the merging process of two KGs). To this end, a novel Transformer-based Graph Encoder (Trans-GE) is proposed as a key component of i-Align for aggregating information from entities' neighbors (structures). Trans-GE uses Edge-gated Attention that combines the adjacency matrix and the self-attention matrix to learn a gating mechanism to control the information aggregation from the neighboring entities. It also uses historical embeddings, allowing Trans-GE to be trained over mini-batches, or smaller sub-graphs, to address the scalability issue when encoding a large KG. Another component of i-Align is a Transformer encoder for aggregating entities' attributes. This way, i-Align can generate explanations in the form of a set of the most influential attributes/neighbors based on attention weights. Extensive experiments are conducted to show the power of i-Align. The experiments include several aspects, such as the model's effectiveness for aligning KGs, the quality of the generated explanations, and its practicality for aligning large KGs. The results show the effectiveness of i-Align in these aspects.
TRAILER: Transformer-based Time-wise Long Term Relation Modeling for Citywide Traffic Flow Prediction
Nov 11, 2020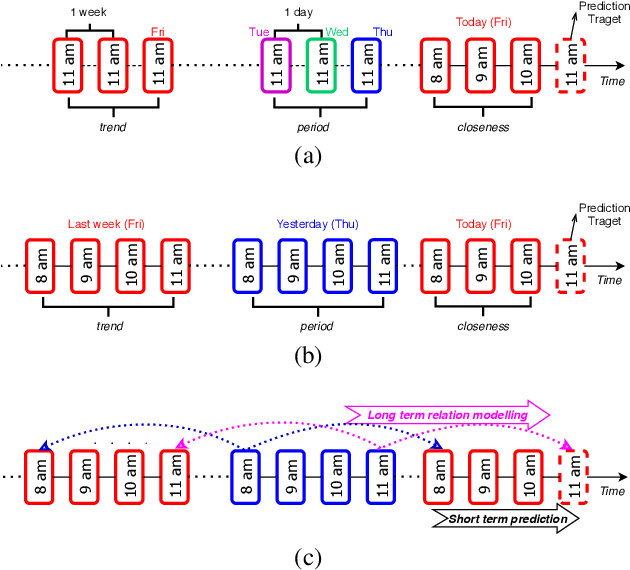
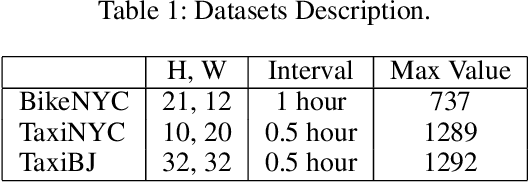
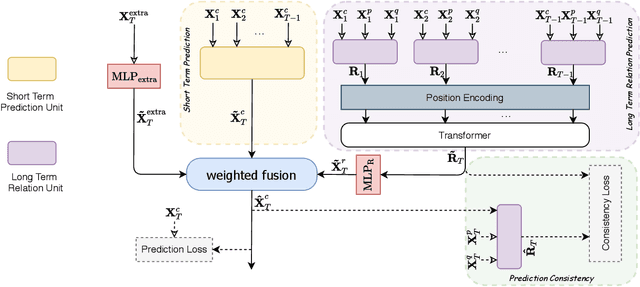
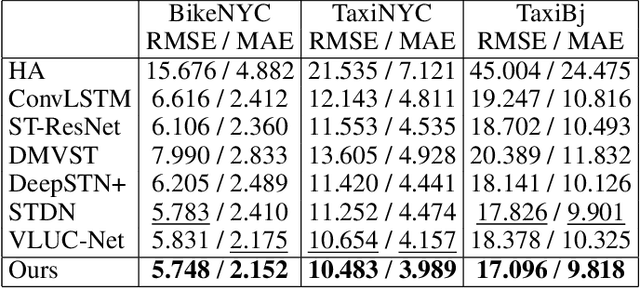
Traffic flow prediction is a crucial task in enabling efficient intelligent transportation systems and smart cities. Although there has been rapid progress in this area in the last few years, given the major advances of deep learning techniques, it remains a challenging task because of the inherent periodic characteristics of traffic flow sequence. To incorporate the periodicity in the prediction process, existing methods have observed three components separately as the input of prediction models, i.e., the closeness, period, and trend components. The long term relation of these components has not been fully addressed. In this paper, we present a novel architecture, TRAILER (TRAnsformer-based tIme-wise Long tErm Relation modeling), to predict traffic flows more effectively. First, we explicitly design a Transformer based long term relation prediction module to model the long term relation and predict the periodic relation to be used for the downstream task. Second, we propose a consistency module at the target time interval, in order to model the consistency of the predicted periodic relation and the relation inferred from the predicted traffic flow tensor. Finally, based on the consistency module, we introduce a consistency loss to stabilize the training process and further improve the prediction performance. Through extensive experiments, we show the superiority of the proposed method on three real-world datasets and the effectiveness of each module in TRAILER.