 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-term Fairness in Ride-Hailing Platform
Jul 25, 2024



Matching in two-sided markets such as ride-hailing has recently received significant attention. However, existing studies on ride-hailing mainly focus on optimising efficiency, and fairness issues in ride-hailing have been neglected. Fairness issues in ride-hailing, including significant earning differences between drivers and variance of passenger waiting times among different locations, have potential impacts on economic and ethical aspects. The recent studies that focus on fairness in ride-hailing exploit traditional optimisation methods and the Markov Decision Process to balance efficiency and fairness. However, there are several issues in these existing studies, such as myopic short-term decision-making from traditional optimisation and instability of fairness in a comparably longer horizon from both traditional optimisation and Markov Decision Process-based methods. To address these issues, we propose a dynamic Markov Decision Process model to alleviate fairness issues currently faced by ride-hailing, and seek a balance between efficiency and fairness, with two distinct characteristics: (i) a prediction module to predict the number of requests that will be raised in the future from different locations to allow the proposed method to consider long-term fairness based on the whole timeline instead of consider fairness only based on historical and current data patterns; (ii) a customised scalarisation function for multi-objective multi-agent Q Learning that aims to balance efficiency and fairness. Extensive experiments on a publicly available real-world dataset demonstrate that our proposed method outperforms existing state-of-the-art methods.
STEMO: Early Spatio-temporal Forecasting with Multi-Objective Reinforcement Learning
Jun 18, 2024Accuracy and timeliness are indeed often conflicting goals in prediction tasks. Premature predictions may yield a higher rate of false alarms, whereas delaying predictions to gather more information can render them too late to be useful. In applications such as wildfires, crimes, and traffic jams, timely forecasting are vital for safeguarding human life and property. Consequently, finding a balance between accuracy and timeliness is crucial. In this paper, we propose an early spatio-temporal forecasting model based on Multi-Objective reinforcement learning that can either implement an optimal policy given a preference or infer the preference based on a small number of samples. The model addresses two primary challenges: 1) enhancing the accuracy of early forecasting and 2) providing the optimal policy for determining the most suitable prediction time for each area. Our method demonstrates superior performance on three large-scale real-world datasets, surpassing existing methods in early spatio-temporal forecasting tasks.
Spatio-temporal Early Prediction based on Multi-objective Reinforcement Learning
Jun 06, 2024Accuracy and timeliness are indeed often conflicting goals in prediction tasks. Premature predictions may yield a higher rate of false alarms, whereas delaying predictions to gather more information can render them too late to be useful. In applications such as wildfires, crimes, and traffic jams, timely predictions are vital for safeguarding human life and property. Consequently, finding a balance between accuracy and timeliness is crucial. In this paper, we propose a spatio-temporal early prediction model based on Multi-Objective reinforcement learning that can either implement an optimal policy given a preference or infer the preference based on a small number of samples. The model addresses two primary challenges: 1) enhancing the accuracy of early predictions and 2) providing the optimal policy for determining the most suitable prediction time for each area. Our method demonstrates superior performance on three large-scale real-world datasets, surpassing existing methods in early spatio-temporal prediction tasks.
Promoting Two-sided Fairness in Dynamic Vehicle Routing Problem
May 29, 2024Dynamic Vehicle Routing Problem (DVRP), is an extension of the classic Vehicle Routing Problem (VRP), which is a fundamental problem in logistics and transportation. Typically, DVRPs involve two stakeholders: service providers that deliver services to customers and customers who raise requests from different locations. Many real-world applications can be formulated as DVRP such as ridesharing and non-compliance capture. Apart from original objectives like optimising total utility or efficiency, DVRP should also consider fairness for all parties. Unfairness can induce service providers and customers to give up on the systems, leading to negative financial and social impacts. However, most existing DVRP-related applications focus on improving fairness from a single side, and there have been few works considering two-sided fairness and utility optimisation concurrently. To this end, we propose a novel framework, a Two-sided Fairness-aware Genetic Algorithm (named 2FairGA), which expands the genetic algorithm from the original objective solely focusing on utility to multi-objectives that incorporate two-sided fairness. Subsequently, the impact of injecting two fairness definitions into the utility-focused model and the correlation between any pair of the three objectives are explored. Extensive experiments demonstrate the superiority of our proposed framework compared to the state-of-the-art.
Long-term Spatio-temporal Forecasting via Dynamic Multiple-Graph Attention
May 02, 2022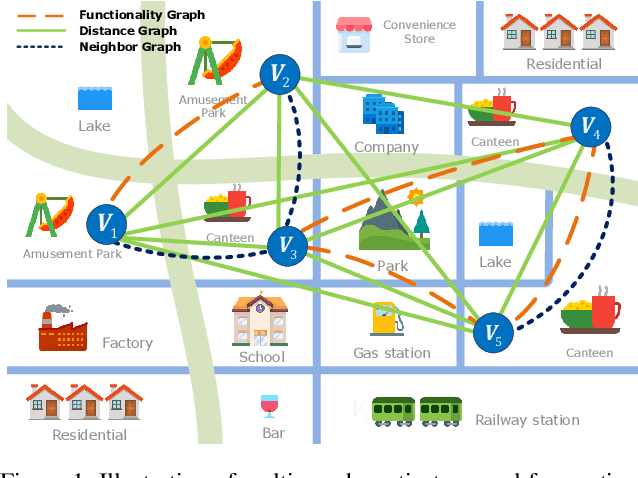
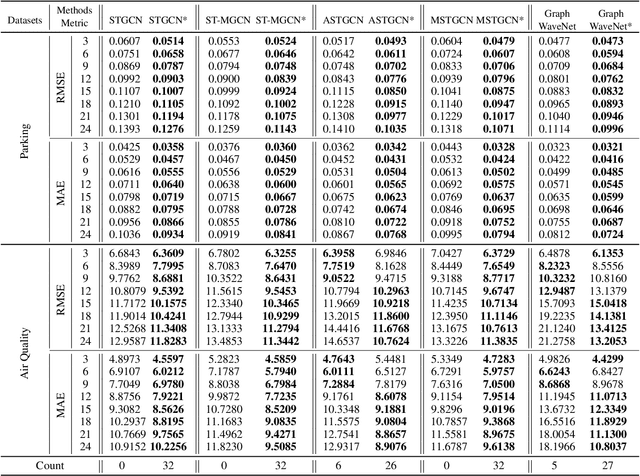
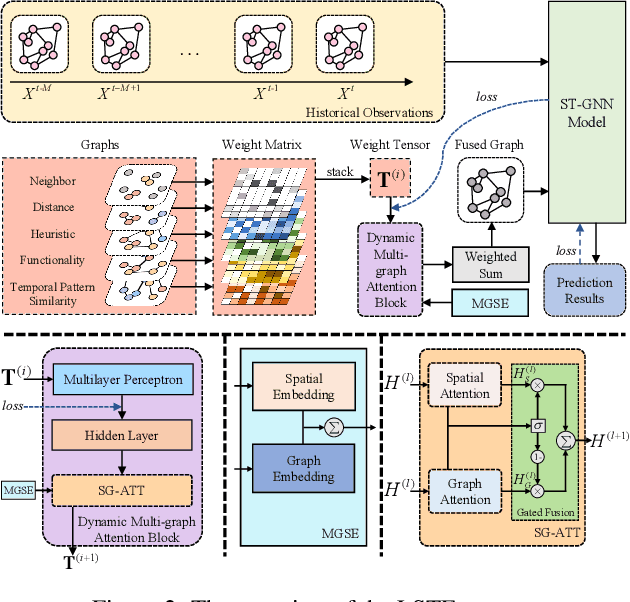
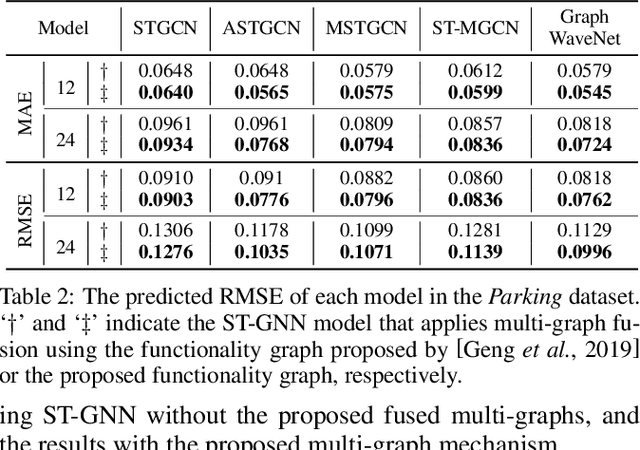
Many real-world ubiquitous applications, such as parking recommendations and air pollution monitoring, benefit significantly from accurate long-term spatio-temporal forecasting (LSTF). LSTF makes use of long-term dependency between spatial and temporal domains, contextual information, and inherent pattern in the data. Recent studies have revealed the potential of multi-graph neural networks (MGNNs) to improve prediction performance. However, existing MGNN methods cannot be directly applied to LSTF due to several issues: the low level of generality, insufficient use of contextual information, and the imbalanced graph fusion approach. To address these issues, we construct new graph models to represent the contextual information of each node and the long-term spatio-temporal data dependency structure. To fuse the information across multiple graphs, we propose a new dynamic multi-graph fusion module to characterize the correlations of nodes within a graph and the nodes across graphs via the spatial attention and graph attention mechanisms. Furthermore, we introduce a trainable weight tensor to indicate the importance of each node in different graphs. Extensive experiments on two large-scale datasets demonstrate that our proposed approaches significantly improve the performance of existing graph neural network models in LSTF prediction tasks.