 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimplifying Distributed Neural Network Training on Massive Graphs: Randomized Partitions Improve Model Aggregation
May 17, 2023



Distributed training of GNNs enables learning on massive graphs (e.g., social and e-commerce networks) that exceed the storage and computational capacity of a single machine. To reach performance comparable to centralized training, distributed frameworks focus on maximally recovering cross-instance node dependencies with either communication across instances or periodic fallback to centralized training, which create overhead and limit the framework scalability. In this work, we present a simplified framework for distributed GNN training that does not rely on the aforementioned costly operations, and has improved scalability, convergence speed and performance over the state-of-the-art approaches. Specifically, our framework (1) assembles independent trainers, each of which asynchronously learns a local model on locally-available parts of the training graph, and (2) only conducts periodic (time-based) model aggregation to synchronize the local models. Backed by our theoretical analysis, instead of maximizing the recovery of cross-instance node dependencies -- which has been considered the key behind closing the performance gap between model aggregation and centralized training -- , our framework leverages randomized assignment of nodes or super-nodes (i.e., collections of original nodes) to partition the training graph such that it improves data uniformity and minimizes the discrepancy of gradient and loss function across instances. In our experiments on social and e-commerce networks with up to 1.3 billion edges, our proposed RandomTMA and SuperTMA approaches -- despite using less training data -- achieve state-of-the-art performance and 2.31x speedup compared to the fastest baseline, and show better robustness to trainer failures.
Task-Agnostic Graph Explanations
Feb 16, 2022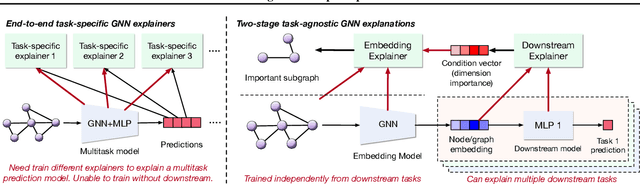

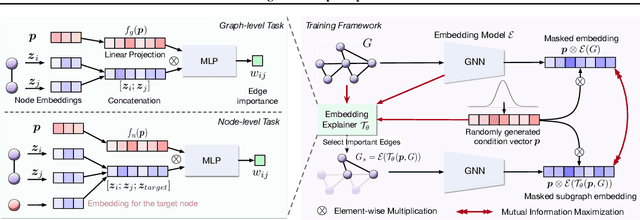
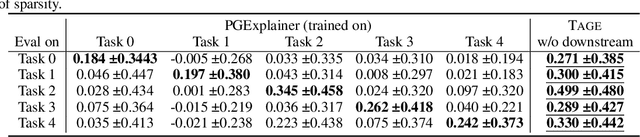
Graph Neural Networks (GNNs) have emerged as powerful tools to encode graph structured data. Due to their broad applications, there is an increasing need to develop tools to explain how GNNs make decisions given graph structured data. Existing learning-based GNN explanation approaches are task-specific in training and hence suffer from crucial drawbacks. Specifically, they are incapable of producing explanations for a multitask prediction model with a single explainer. They are also unable to provide explanations in cases where the GNN is trained in a self-supervised manner, and the resulting representations are used in future downstream tasks. To address these limitations, we propose a Task-Agnostic GNN Explainer (TAGE) trained under self-supervision with no knowledge of downstream tasks. TAGE enables the explanation of GNN embedding models without downstream tasks and allows efficient explanation of multitask models. Our extensive experiments show that TAGE can significantly speed up the explanation efficiency by using the same model to explain predictions for multiple downstream tasks while achieving explanation quality as good as or even better than current state-of-the-art GNN explanation approaches.