 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjectReact: Learning Object-Relative Control for Visual Navigation
Sep 11, 2025Visual navigation using only a single camera and a topological map has recently become an appealing alternative to methods that require additional sensors and 3D maps. This is typically achieved through an "image-relative" approach to estimating control from a given pair of current observation and subgoal image. However, image-level representations of the world have limitations because images are strictly tied to the agent's pose and embodiment. In contrast, objects, being a property of the map, offer an embodiment- and trajectory-invariant world representation. In this work, we present a new paradigm of learning "object-relative" control that exhibits several desirable characteristics: a) new routes can be traversed without strictly requiring to imitate prior experience, b) the control prediction problem can be decoupled from solving the image matching problem, and c) high invariance can be achieved in cross-embodiment deployment for variations across both training-testing and mapping-execution settings. We propose a topometric map representation in the form of a "relative" 3D scene graph, which is used to obtain more informative object-level global path planning costs. We train a local controller, dubbed "ObjectReact", conditioned directly on a high-level "WayObject Costmap" representation that eliminates the need for an explicit RGB input. We demonstrate the advantages of learning object-relative control over its image-relative counterpart across sensor height variations and multiple navigation tasks that challenge the underlying spatial understanding capability, e.g., navigating a map trajectory in the reverse direction. We further show that our sim-only policy is able to generalize well to real-world indoor environments. Code and supplementary material are accessible via project page: https://object-react.github.io/
Symmetry-Breaking Augmentations for Ad Hoc Teamwork
Feb 15, 2024



In many collaborative settings, artificial intelligence (AI) agents must be able to adapt to new teammates that use unknown or previously unobserved strategies. While often simple for humans, this can be challenging for AI agents. For example, if an AI agent learns to drive alongside others (a training set) that only drive on one side of the road, it may struggle to adapt this experience to coordinate with drivers on the opposite side, even if their behaviours are simply flipped along the left-right symmetry. To address this we introduce symmetry-breaking augmentations (SBA), which increases diversity in the behaviour of training teammates by applying a symmetry-flipping operation. By learning a best-response to the augmented set of teammates, our agent is exposed to a wider range of behavioural conventions, improving performance when deployed with novel teammates. We demonstrate this experimentally in two settings, and show that our approach improves upon previous ad hoc teamwork results in the challenging card game Hanabi. We also propose a general metric for estimating symmetry-dependency amongst a given set of policies.
Robotic Vision for Space Mining
Sep 30, 2021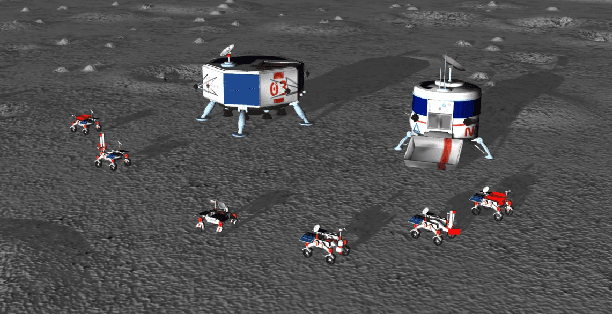
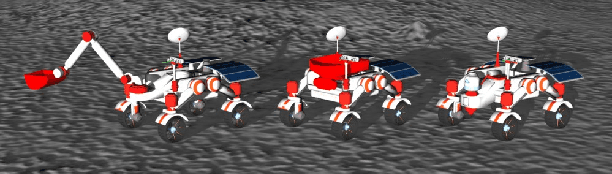
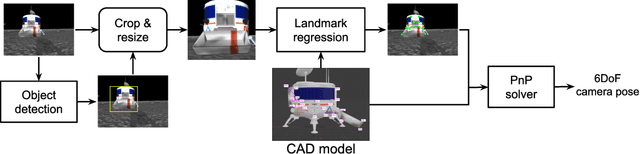

Future Moon bases will likely be constructed using resources mined from the surface of the Moon. The difficulty of maintaining a human workforce on the Moon and communications lag with Earth means that mining will need to be conducted using collaborative robots with a high degree of autonomy. In this paper, we explore the utility of robotic vision towards addressing several major challenges in autonomous mining in the lunar environment: lack of satellite positioning systems, navigation in hazardous terrain, and delicate robot interactions. Specifically, we describe and report the results of robotic vision algorithms that we developed for Phase 2 of the NASA Space Robotics Challenge, which was framed in the context of autonomous collaborative robots for mining on the Moon. The competition provided a simulated lunar environment that exhibits the complexities alluded to above. We show how machine learning-enabled vision could help alleviate the challenges posed by the lunar environment. A robust multi-robot coordinator was also developed to achieve long-term operation and effective collaboration between robots.