 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAd-Hoc Human-AI Coordination Challenge
Jun 26, 2025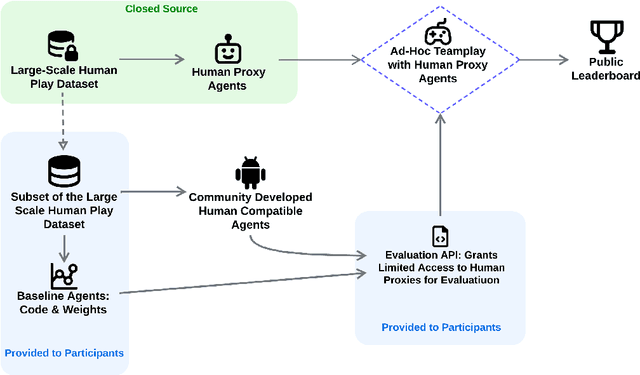

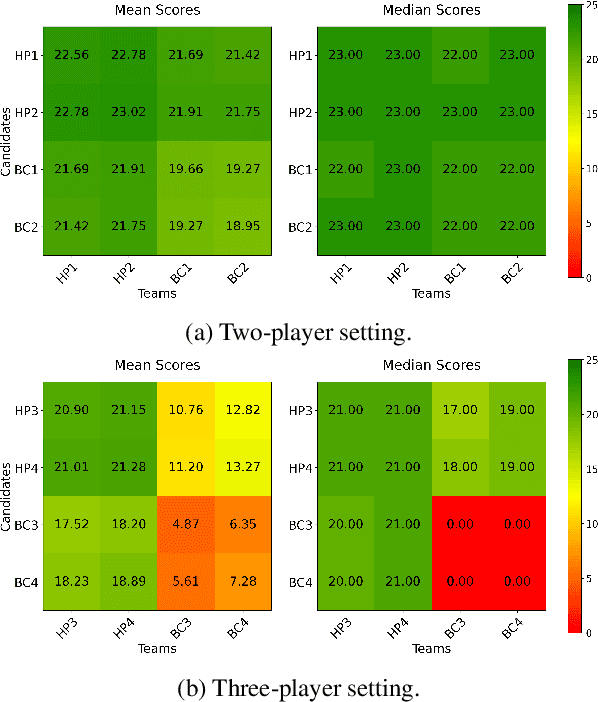

Achieving seamless coordination between AI agents and humans is crucial for real-world applications, yet it remains a significant open challenge. Hanabi is a cooperative card game featuring imperfect information, constrained communication, theory of mind requirements, and coordinated action -- making it an ideal testbed for human-AI coordination. However, its use for human-AI interaction has been limited by the challenges of human evaluation. In this work, we introduce the Ad-Hoc Human-AI Coordination Challenge (AH2AC2) to overcome the constraints of costly and difficult-to-reproduce human evaluations. We develop \textit{human proxy agents} on a large-scale human dataset that serve as robust, cheap, and reproducible human-like evaluation partners in AH2AC2. To encourage the development of data-efficient methods, we open-source a dataset of 3,079 games, deliberately limiting the amount of available human gameplay data. We present baseline results for both two- and three- player Hanabi scenarios. To ensure fair evaluation, we host the proxy agents through a controlled evaluation system rather than releasing them publicly. The code is available at \href{https://github.com/FLAIROx/ah2ac2}{https://github.com/FLAIROx/ah2ac2}.
Symmetry-Breaking Augmentations for Ad Hoc Teamwork
Feb 15, 2024



In many collaborative settings, artificial intelligence (AI) agents must be able to adapt to new teammates that use unknown or previously unobserved strategies. While often simple for humans, this can be challenging for AI agents. For example, if an AI agent learns to drive alongside others (a training set) that only drive on one side of the road, it may struggle to adapt this experience to coordinate with drivers on the opposite side, even if their behaviours are simply flipped along the left-right symmetry. To address this we introduce symmetry-breaking augmentations (SBA), which increases diversity in the behaviour of training teammates by applying a symmetry-flipping operation. By learning a best-response to the augmented set of teammates, our agent is exposed to a wider range of behavioural conventions, improving performance when deployed with novel teammates. We demonstrate this experimentally in two settings, and show that our approach improves upon previous ad hoc teamwork results in the challenging card game Hanabi. We also propose a general metric for estimating symmetry-dependency amongst a given set of policies.
Robotic Vision for Space Mining
Sep 30, 2021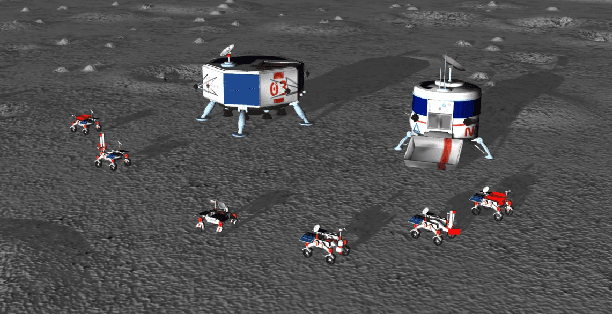
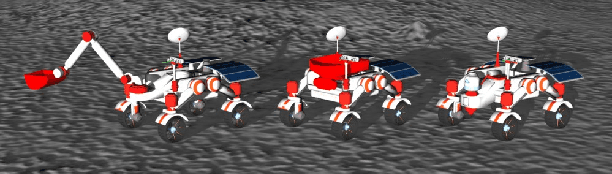
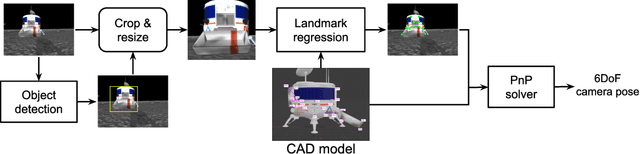

Future Moon bases will likely be constructed using resources mined from the surface of the Moon. The difficulty of maintaining a human workforce on the Moon and communications lag with Earth means that mining will need to be conducted using collaborative robots with a high degree of autonomy. In this paper, we explore the utility of robotic vision towards addressing several major challenges in autonomous mining in the lunar environment: lack of satellite positioning systems, navigation in hazardous terrain, and delicate robot interactions. Specifically, we describe and report the results of robotic vision algorithms that we developed for Phase 2 of the NASA Space Robotics Challenge, which was framed in the context of autonomous collaborative robots for mining on the Moon. The competition provided a simulated lunar environment that exhibits the complexities alluded to above. We show how machine learning-enabled vision could help alleviate the challenges posed by the lunar environment. A robust multi-robot coordinator was also developed to achieve long-term operation and effective collaboration between robots.