 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Diffusion-based Contract Design for Efficient AI Twins Migration in Vehicular Embodied AI Networks
Oct 02, 2024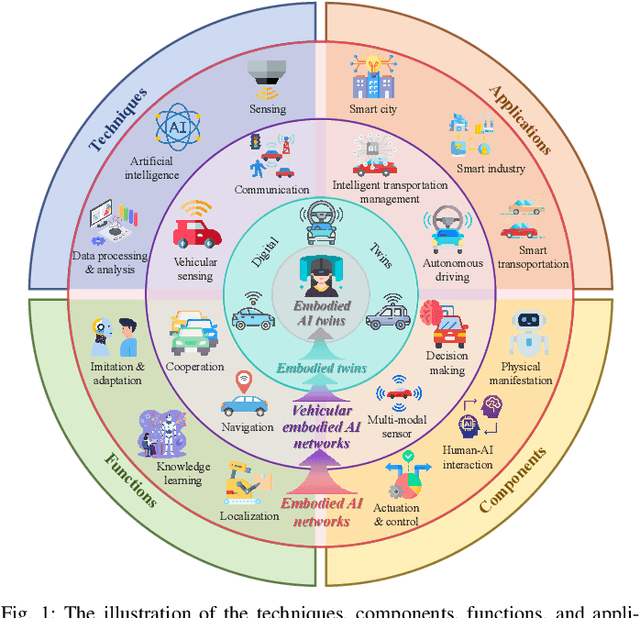
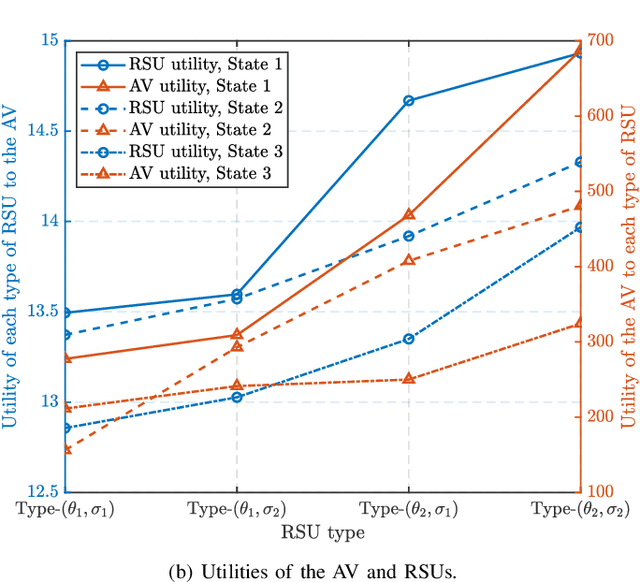
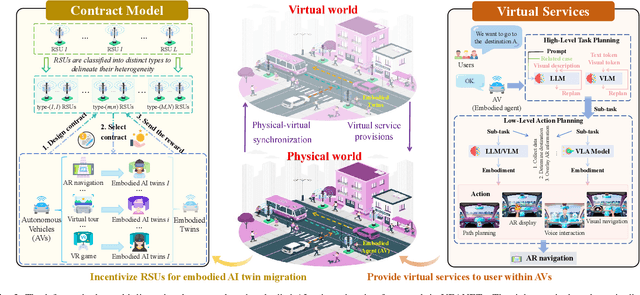
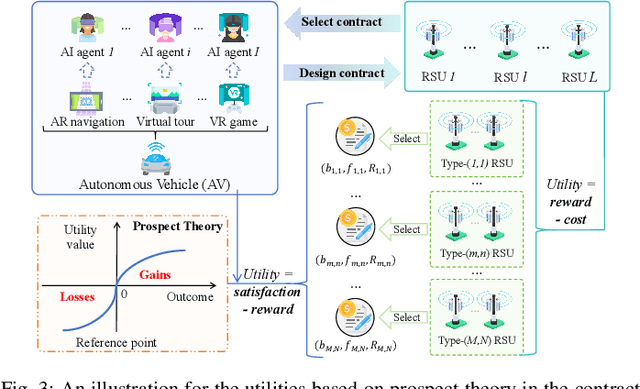
Embodied AI is a rapidly advancing field that bridges the gap between cyberspace and physical space, enabling a wide range of applications. This evolution has led to the development of the Vehicular Embodied AI NETwork (VEANET), where advanced AI capabilities are integrated into vehicular systems to enhance autonomous operations and decision-making. Embodied agents, such as Autonomous Vehicles (AVs), are autonomous entities that can perceive their environment and take actions to achieve specific goals, actively interacting with the physical world. Embodied twins are digital models of these embodied agents, with various embodied AI twins for intelligent applications in cyberspace. In VEANET, embodied AI twins act as in-vehicle AI assistants to perform diverse tasks supporting autonomous driving using generative AI models. Due to limited computational resources of AVs, these AVs often offload computationally intensive tasks, such as constructing and updating embodied AI twins, to nearby RSUs. However, since the rapid mobility of AVs and the limited provision coverage of a single RSU, embodied AI twins require dynamic migrations from current RSU to other RSUs in real-time, resulting in the challenge of selecting suitable RSUs for efficient embodied AI twins migrations. Given information asymmetry, AVs cannot know the detailed information of RSUs. To this end, in this paper, we construct a multi-dimensional contract theoretical model between AVs and alternative RSUs. Considering that AVs may exhibit irrational behavior, we utilize prospect theory instead of expected utility theory to model the actual utilities of AVs. Finally, we employ a generative diffusion model-based algorithm to identify the optimal contract designs. Compared with traditional deep reinforcement learning algorithms, numerical results demonstrate the effectiveness of the proposed scheme.
Tiny Multi-Agent DRL for Twins Migration in UAV Metaverses: A Multi-Leader Multi-Follower Stackelberg Game Approach
Jan 18, 2024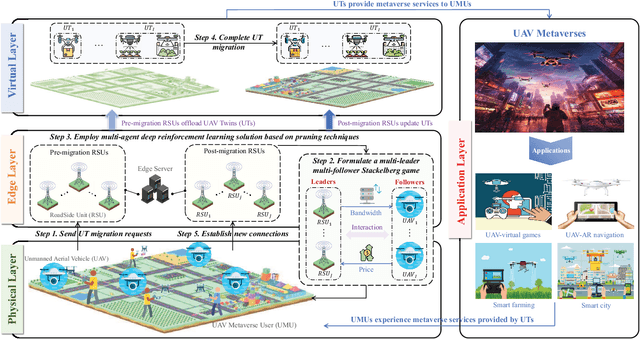
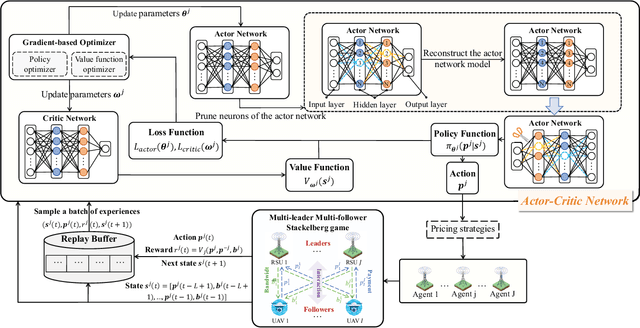
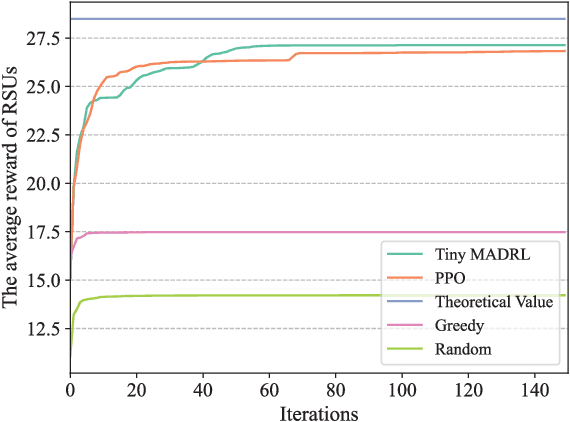
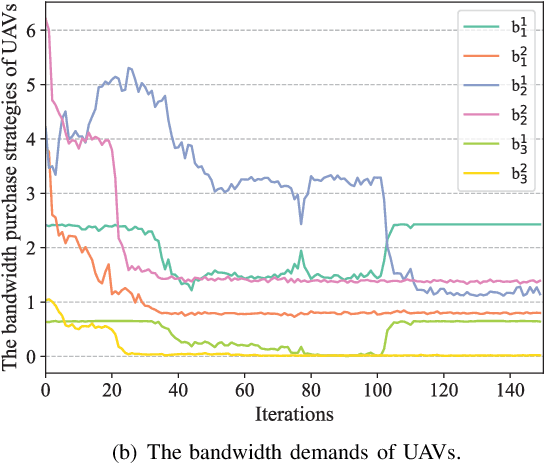
The synergy between Unmanned Aerial Vehicles (UAVs) and metaverses is giving rise to an emerging paradigm named UAV metaverses, which create a unified ecosystem that blends physical and virtual spaces, transforming drone interaction and virtual exploration. UAV Twins (UTs), as the digital twins of UAVs that revolutionize UAV applications by making them more immersive, realistic, and informative, are deployed and updated on ground base stations, e.g., RoadSide Units (RSUs), to offer metaverse services for UAV Metaverse Users (UMUs). Due to the dynamic mobility of UAVs and limited communication coverages of RSUs, it is essential to perform real-time UT migration to ensure seamless immersive experiences for UMUs. However, selecting appropriate RSUs and optimizing the required bandwidth is challenging for achieving reliable and efficient UT migration. To address the challenges, we propose a tiny machine learning-based Stackelberg game framework based on pruning techniques for efficient UT migration in UAV metaverses. Specifically, we formulate a multi-leader multi-follower Stackelberg model considering a new immersion metric of UMUs in the utilities of UAVs. Then, we design a Tiny Multi-Agent Deep Reinforcement Learning (Tiny MADRL) algorithm to obtain the tiny networks representing the optimal game solution. Specifically, the actor-critic network leverages the pruning techniques to reduce the number of network parameters and achieve model size and computation reduction, allowing for efficient implementation of Tiny MADRL. Numerical results demonstrate that our proposed schemes have better performance than traditional schemes.
Blockchain-empowered Federated Learning for Healthcare Metaverses: User-centric Incentive Mechanism with Optimal Data Freshness
Jul 29, 2023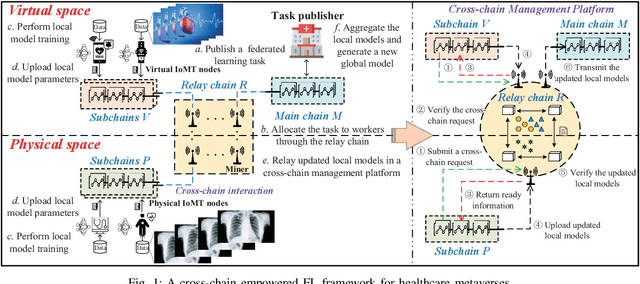
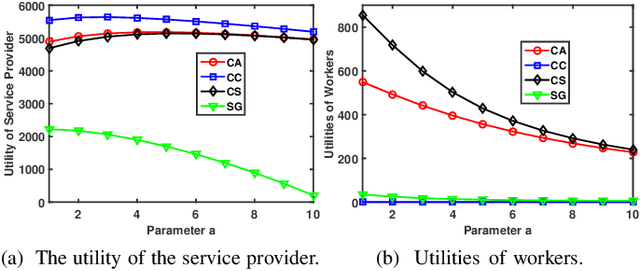
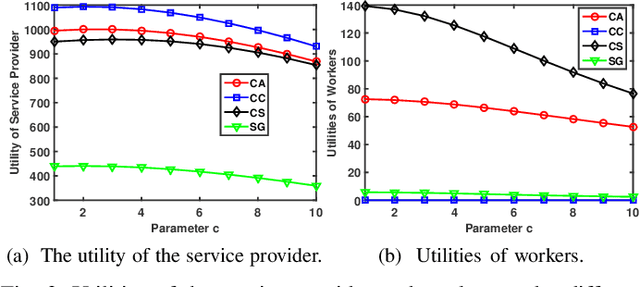
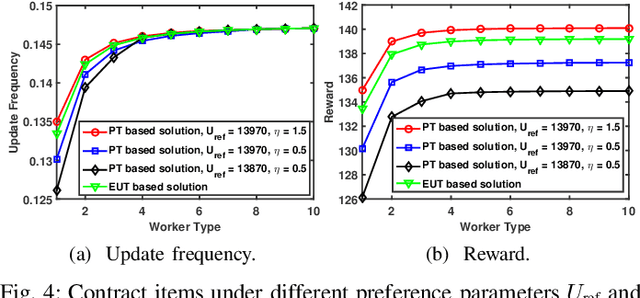
Given the revolutionary role of metaverses, healthcare metaverses are emerging as a transformative force, creating intelligent healthcare systems that offer immersive and personalized services. The healthcare metaverses allow for effective decision-making and data analytics for users. However, there still exist critical challenges in building healthcare metaverses, such as the risk of sensitive data leakage and issues with sensing data security and freshness, as well as concerns around incentivizing data sharing. In this paper, we first design a user-centric privacy-preserving framework based on decentralized Federated Learning (FL) for healthcare metaverses. To further improve the privacy protection of healthcare metaverses, a cross-chain empowered FL framework is utilized to enhance sensing data security. This framework utilizes a hierarchical cross-chain architecture with a main chain and multiple subchains to perform decentralized, privacy-preserving, and secure data training in both virtual and physical spaces. Moreover, we utilize Age of Information (AoI) as an effective data-freshness metric and propose an AoI-based contract theory model under Prospect Theory (PT) to motivate sensing data sharing in a user-centric manner. This model exploits PT to better capture the subjective utility of the service provider. Finally, our numerical results demonstrate the effectiveness of the proposed schemes for healthcare metaverses.