 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Diffusion-based Contract Design for Efficient AI Twins Migration in Vehicular Embodied AI Networks
Paper and Code
Oct 02, 2024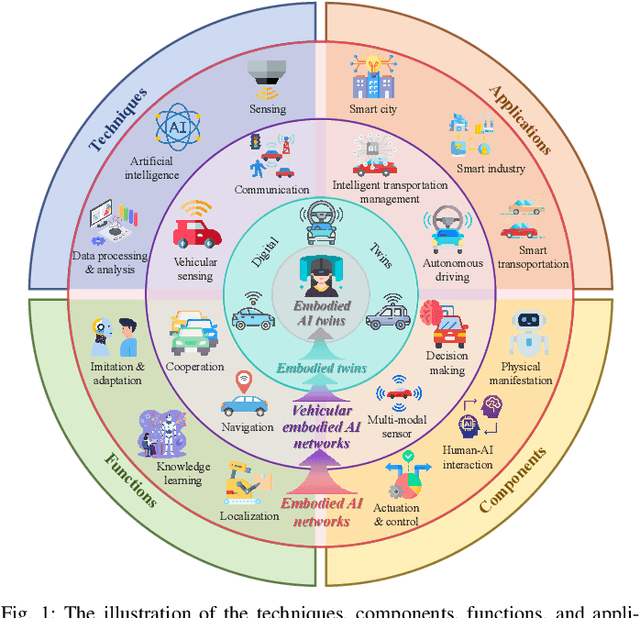
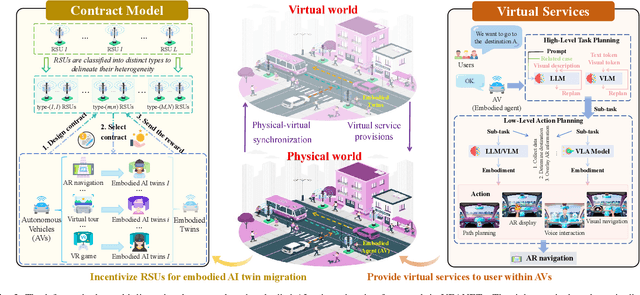
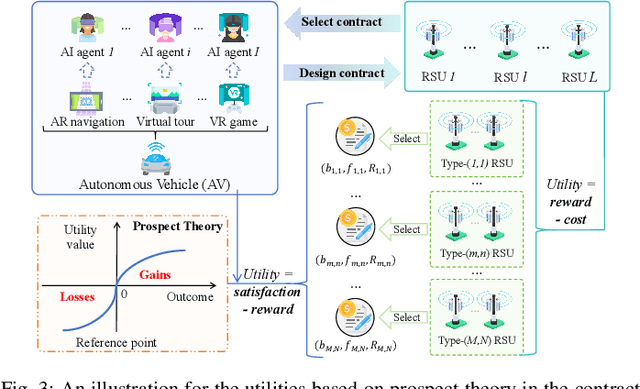
Embodied AI is a rapidly advancing field that bridges the gap between cyberspace and physical space, enabling a wide range of applications. This evolution has led to the development of the Vehicular Embodied AI NETwork (VEANET), where advanced AI capabilities are integrated into vehicular systems to enhance autonomous operations and decision-making. Embodied agents, such as Autonomous Vehicles (AVs), are autonomous entities that can perceive their environment and take actions to achieve specific goals, actively interacting with the physical world. Embodied twins are digital models of these embodied agents, with various embodied AI twins for intelligent applications in cyberspace. In VEANET, embodied AI twins act as in-vehicle AI assistants to perform diverse tasks supporting autonomous driving using generative AI models. Due to limited computational resources of AVs, these AVs often offload computationally intensive tasks, such as constructing and updating embodied AI twins, to nearby RSUs. However, since the rapid mobility of AVs and the limited provision coverage of a single RSU, embodied AI twins require dynamic migrations from current RSU to other RSUs in real-time, resulting in the challenge of selecting suitable RSUs for efficient embodied AI twins migrations. Given information asymmetry, AVs cannot know the detailed information of RSUs. To this end, in this paper, we construct a multi-dimensional contract theoretical model between AVs and alternative RSUs. Considering that AVs may exhibit irrational behavior, we utilize prospect theory instead of expected utility theory to model the actual utilities of AVs. Finally, we employ a generative diffusion model-based algorithm to identify the optimal contract designs. Compared with traditional deep reinforcement learning algorithms, numerical results demonstrate the effectiveness of the proposed scheme.