 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTiny Multi-Agent DRL for Twins Migration in UAV Metaverses: A Multi-Leader Multi-Follower Stackelberg Game Approach
Paper and Code
Jan 18, 2024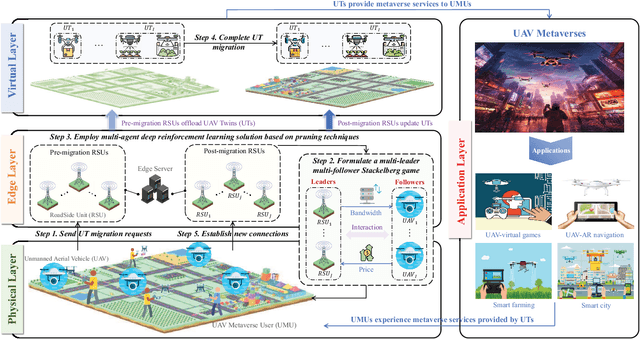
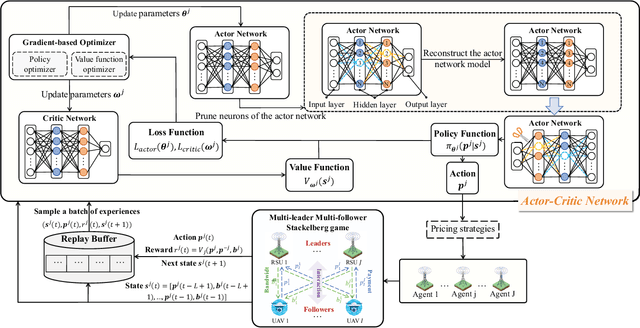
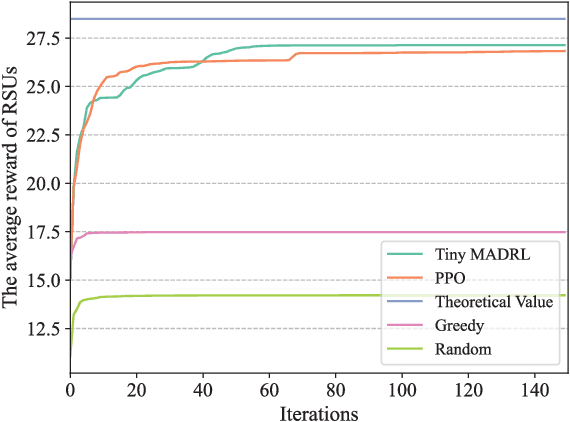
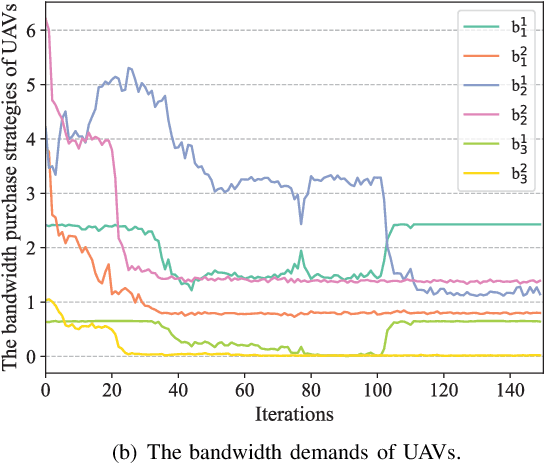
The synergy between Unmanned Aerial Vehicles (UAVs) and metaverses is giving rise to an emerging paradigm named UAV metaverses, which create a unified ecosystem that blends physical and virtual spaces, transforming drone interaction and virtual exploration. UAV Twins (UTs), as the digital twins of UAVs that revolutionize UAV applications by making them more immersive, realistic, and informative, are deployed and updated on ground base stations, e.g., RoadSide Units (RSUs), to offer metaverse services for UAV Metaverse Users (UMUs). Due to the dynamic mobility of UAVs and limited communication coverages of RSUs, it is essential to perform real-time UT migration to ensure seamless immersive experiences for UMUs. However, selecting appropriate RSUs and optimizing the required bandwidth is challenging for achieving reliable and efficient UT migration. To address the challenges, we propose a tiny machine learning-based Stackelberg game framework based on pruning techniques for efficient UT migration in UAV metaverses. Specifically, we formulate a multi-leader multi-follower Stackelberg model considering a new immersion metric of UMUs in the utilities of UAVs. Then, we design a Tiny Multi-Agent Deep Reinforcement Learning (Tiny MADRL) algorithm to obtain the tiny networks representing the optimal game solution. Specifically, the actor-critic network leverages the pruning techniques to reduce the number of network parameters and achieve model size and computation reduction, allowing for efficient implementation of Tiny MADRL. Numerical results demonstrate that our proposed schemes have better performance than traditional schemes.