 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuanta Diffusion
Jun 07, 2025We present Quanta Diffusion (QuDi), a powerful generative video reconstruction method for single-photon imaging. QuDi is an algorithm supporting the latest Quanta Image Sensors (QIS) and Single Photon Avalanche Diodes (SPADs) for extremely low-light imaging conditions. Compared to existing methods, QuDi overcomes the difficulties of simultaneously managing the motion and the strong shot noise. The core innovation of QuDi is to inject a physics-based forward model into the diffusion algorithm, while keeping the motion estimation in the loop. QuDi demonstrates an average of 2.4 dB PSNR improvement over the best existing methods.
NAIS: Neural Architecture and Implementation Search and its Applications in Autonomous Driving
Nov 18, 2019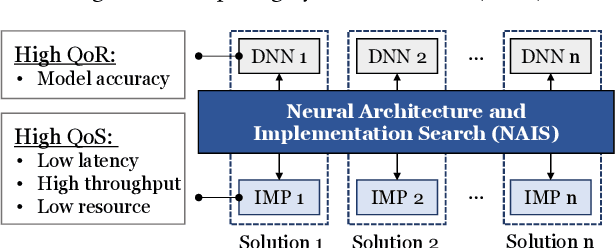
The rapidly growing demands for powerful AI algorithms in many application domains have motivated massive investment in both high-quality deep neural network (DNN) models and high-efficiency implementations. In this position paper, we argue that a simultaneous DNN/implementation co-design methodology, named Neural Architecture and Implementation Search (NAIS), deserves more research attention to boost the development productivity and efficiency of both DNN models and implementation optimization. We propose a stylized design methodology that can drastically cut down the search cost while preserving the quality of the end solution.As an illustration, we discuss this DNN/implementation methodology in the context of both FPGAs and GPUs. We take autonomous driving as a key use case as it is one of the most demanding areas for high quality AI algorithms and accelerators. We discuss how such a co-design methodology can impact the autonomous driving industry significantly. We identify several research opportunities in this exciting domain.
Learning Object-specific Distance from a Monocular Image
Sep 09, 2019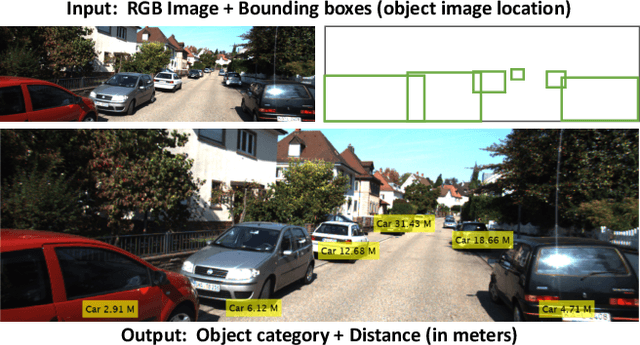
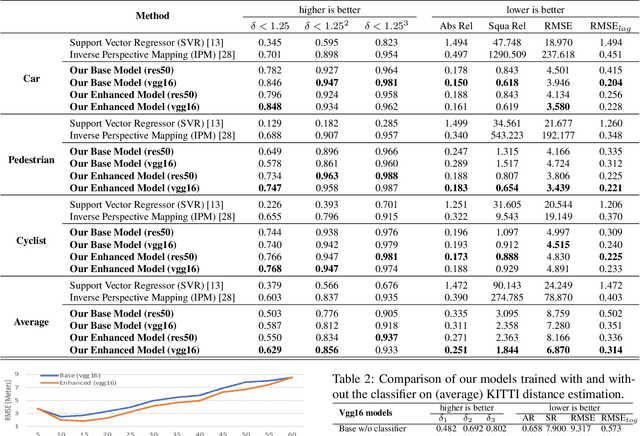
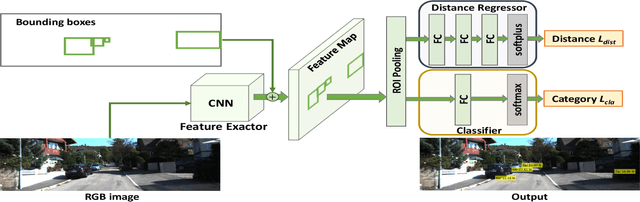

Environment perception, including object detection and distance estimation, is one of the most crucial tasks for autonomous driving. Many attentions have been paid on the object detection task, but distance estimation only arouse few interests in the computer vision community. Observing that the traditional inverse perspective mapping algorithm performs poorly for objects far away from the camera or on the curved road, in this paper, we address the challenging distance estimation problem by developing the first end-to-end learning-based model to directly predict distances for given objects in the images. Besides the introduction of a learning-based base model, we further design an enhanced model with a keypoint regressor, where a projection loss is defined to enforce a better distance estimation, especially for objects close to the camera. To facilitate the research on this task, we construct the extented KITTI and nuScenes (mini) object detection datasets with a distance for each object. Our experiments demonstrate that our proposed methods outperform alternative approaches (e.g., the traditional IPM, SVR) on object-specific distance estimation, particularly for the challenging cases that objects are on a curved road. Moreover, the performance margin implies the effectiveness of our enhanced method.