 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarization Wavefront Lidar: Learning Large Scene Reconstruction from Polarized Wavefronts
Jun 05, 2024



Lidar has become a cornerstone sensing modality for 3D vision, especially for large outdoor scenarios and autonomous driving. Conventional lidar sensors are capable of providing centimeter-accurate distance information by emitting laser pulses into a scene and measuring the time-of-flight (ToF) of the reflection. However, the polarization of the received light that depends on the surface orientation and material properties is usually not considered. As such, the polarization modality has the potential to improve scene reconstruction beyond distance measurements. In this work, we introduce a novel long-range polarization wavefront lidar sensor (PolLidar) that modulates the polarization of the emitted and received light. Departing from conventional lidar sensors, PolLidar allows access to the raw time-resolved polarimetric wavefronts. We leverage polarimetric wavefronts to estimate normals, distance, and material properties in outdoor scenarios with a novel learned reconstruction method. To train and evaluate the method, we introduce a simulated and real-world long-range dataset with paired raw lidar data, ground truth distance, and normal maps. We find that the proposed method improves normal and distance reconstruction by 53\% mean angular error and 41\% mean absolute error compared to existing shape-from-polarization (SfP) and ToF methods. Code and data are open-sourced at https://light.princeton.edu/pollidar.
Real-Time Environment Condition Classification for Autonomous Vehicles
May 29, 2024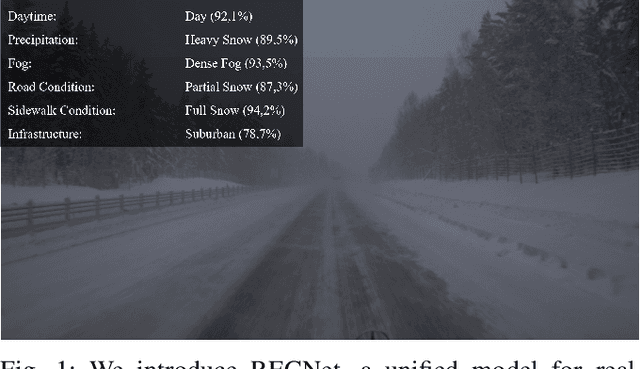
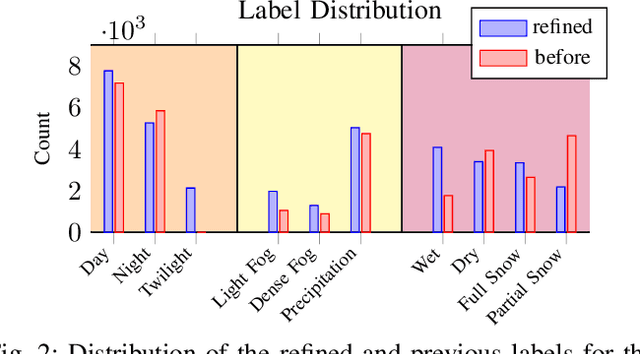
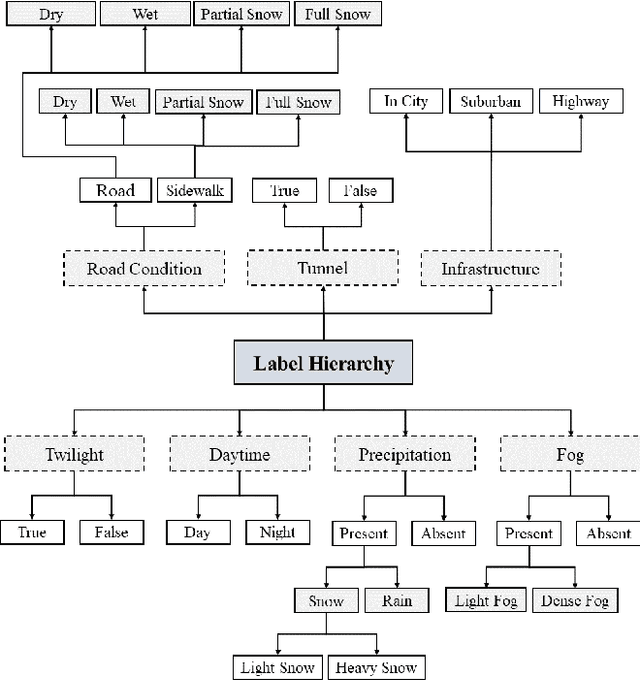
Current autonomous driving technologies are being rolled out in geo-fenced areas with well-defined operation conditions such as time of operation, area, weather conditions and road conditions. In this way, challenging conditions as adverse weather, slippery road or densely-populated city centers can be excluded. In order to lift the geo-fenced restriction and allow a more dynamic availability of autonomous driving functions, it is necessary for the vehicle to autonomously perform an environment condition assessment in real time to identify when the system cannot operate safely and either stop operation or require the resting passenger to take control. In particular, adverse-weather challenges are a fundamental limitation as sensor performance degenerates quickly, prohibiting the use of sensors such as cameras to locate and monitor road signs, pedestrians or other vehicles. To address this issue, we train a deep learning model to identify outdoor weather and dangerous road conditions, enabling a quick reaction to new situations and environments. We achieve this by introducing an improved taxonomy and label hierarchy for a state-of-the-art adverse-weather dataset, relabelling it with a novel semi-automated labeling pipeline. Using the novel proposed dataset and hierarchy, we train RECNet, a deep learning model for the classification of environment conditions from a single RGB frame. We outperform baseline models by relative 16% in F1- Score, while maintaining a real-time capable performance of 20 Hz.
ScatterNeRF: Seeing Through Fog with Physically-Based Inverse Neural Rendering
May 03, 2023



Vision in adverse weather conditions, whether it be snow, rain, or fog is challenging. In these scenarios, scattering and attenuation severly degrades image quality. Handling such inclement weather conditions, however, is essential to operate autonomous vehicles, drones and robotic applications where human performance is impeded the most. A large body of work explores removing weather-induced image degradations with dehazing methods. Most methods rely on single images as input and struggle to generalize from synthetic fully-supervised training approaches or to generate high fidelity results from unpaired real-world datasets. With data as bottleneck and most of today's training data relying on good weather conditions with inclement weather as outlier, we rely on an inverse rendering approach to reconstruct the scene content. We introduce ScatterNeRF, a neural rendering method which adequately renders foggy scenes and decomposes the fog-free background from the participating media-exploiting the multiple views from a short automotive sequence without the need for a large training data corpus. Instead, the rendering approach is optimized on the multi-view scene itself, which can be typically captured by an autonomous vehicle, robot or drone during operation. Specifically, we propose a disentangled representation for the scattering volume and the scene objects, and learn the scene reconstruction with physics-inspired losses. We validate our method by capturing multi-view In-the-Wild data and controlled captures in a large-scale fog chamber.
Survey on LiDAR Perception in Adverse Weather Conditions
Apr 13, 2023
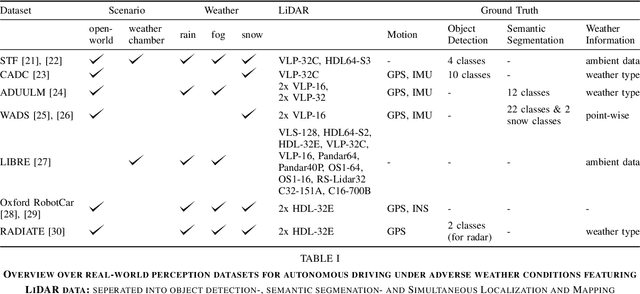
Autonomous vehicles rely on a variety of sensors to gather information about their surrounding. The vehicle's behavior is planned based on the environment perception, making its reliability crucial for safety reasons. The active LiDAR sensor is able to create an accurate 3D representation of a scene, making it a valuable addition for environment perception for autonomous vehicles. Due to light scattering and occlusion, the LiDAR's performance change under adverse weather conditions like fog, snow or rain. This limitation recently fostered a large body of research on approaches to alleviate the decrease in perception performance. In this survey, we gathered, analyzed, and discussed different aspects on dealing with adverse weather conditions in LiDAR-based environment perception. We address topics such as the availability of appropriate data, raw point cloud processing and denoising, robust perception algorithms and sensor fusion to mitigate adverse weather induced shortcomings. We furthermore identify the most pressing gaps in the current literature and pinpoint promising research directions.
Simulating Road Spray Effects in Automotive Lidar Sensor Models
Dec 16, 2022Modeling perception sensors is key for simulation based testing of automated driving functions. Beyond weather conditions themselves, sensors are also subjected to object dependent environmental influences like tire spray caused by vehicles moving on wet pavement. In this work, a novel modeling approach for spray in lidar data is introduced. The model conforms to the Open Simulation Interface (OSI) standard and is based on the formation of detection clusters within a spray plume. The detections are rendered with a simple custom ray casting algorithm without the need of a fluid dynamics simulation or physics engine. The model is subsequently used to generate training data for object detection algorithms. It is shown that the model helps to improve detection in real-world spray scenarios significantly. Furthermore, a systematic real-world data set is recorded and published for analysis, model calibration and validation of spray effects in active perception sensors. Experiments are conducted on a test track by driving over artificially watered pavement with varying vehicle speeds, vehicle types and levels of pavement wetness. All models and data of this work are available open source.