 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurvey on LiDAR Perception in Adverse Weather Conditions
Paper and Code
Apr 13, 2023
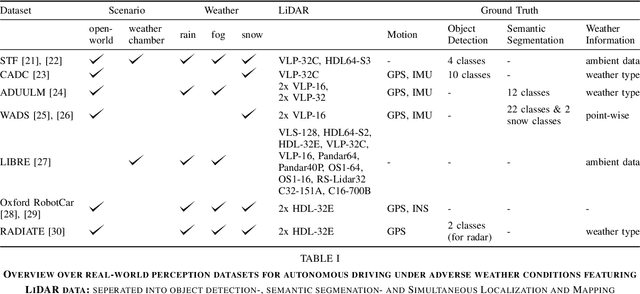
Autonomous vehicles rely on a variety of sensors to gather information about their surrounding. The vehicle's behavior is planned based on the environment perception, making its reliability crucial for safety reasons. The active LiDAR sensor is able to create an accurate 3D representation of a scene, making it a valuable addition for environment perception for autonomous vehicles. Due to light scattering and occlusion, the LiDAR's performance change under adverse weather conditions like fog, snow or rain. This limitation recently fostered a large body of research on approaches to alleviate the decrease in perception performance. In this survey, we gathered, analyzed, and discussed different aspects on dealing with adverse weather conditions in LiDAR-based environment perception. We address topics such as the availability of appropriate data, raw point cloud processing and denoising, robust perception algorithms and sensor fusion to mitigate adverse weather induced shortcomings. We furthermore identify the most pressing gaps in the current literature and pinpoint promising research directions.