 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating Road Spray Effects in Automotive Lidar Sensor Models
Dec 16, 2022Modeling perception sensors is key for simulation based testing of automated driving functions. Beyond weather conditions themselves, sensors are also subjected to object dependent environmental influences like tire spray caused by vehicles moving on wet pavement. In this work, a novel modeling approach for spray in lidar data is introduced. The model conforms to the Open Simulation Interface (OSI) standard and is based on the formation of detection clusters within a spray plume. The detections are rendered with a simple custom ray casting algorithm without the need of a fluid dynamics simulation or physics engine. The model is subsequently used to generate training data for object detection algorithms. It is shown that the model helps to improve detection in real-world spray scenarios significantly. Furthermore, a systematic real-world data set is recorded and published for analysis, model calibration and validation of spray effects in active perception sensors. Experiments are conducted on a test track by driving over artificially watered pavement with varying vehicle speeds, vehicle types and levels of pavement wetness. All models and data of this work are available open source.
Deep Stochastic Radar Models
Jun 16, 2017

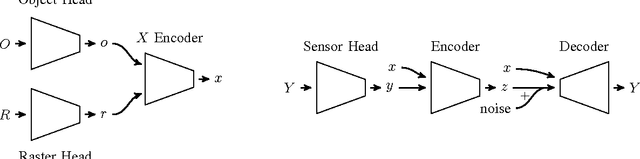

Accurate simulation and validation of advanced driver assistance systems requires accurate sensor models. Modeling automotive radar is complicated by effects such as multipath reflections, interference, reflective surfaces, discrete cells, and attenuation. Detailed radar simulations based on physical principles exist but are computationally intractable for realistic automotive scenes. This paper describes a methodology for the construction of stochastic automotive radar models based on deep learning with adversarial loss connected to real-world data. The resulting model exhibits fundamental radar effects while remaining real-time capable.