Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Stochastic Radar Models
Paper and Code


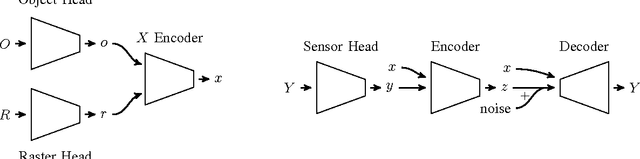

Accurate simulation and validation of advanced driver assistance systems requires accurate sensor models. Modeling automotive radar is complicated by effects such as multipath reflections, interference, reflective surfaces, discrete cells, and attenuation. Detailed radar simulations based on physical principles exist but are computationally intractable for realistic automotive scenes. This paper describes a methodology for the construction of stochastic automotive radar models based on deep learning with adversarial loss connected to real-world data. The resulting model exhibits fundamental radar effects while remaining real-time capable.
* IEEE Intelligent Vehicles Symposium 2017. Accepted for plenary
presentation
View paper on