 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Discrete Bayesian Networks from Continuous Data
Sep 18, 2018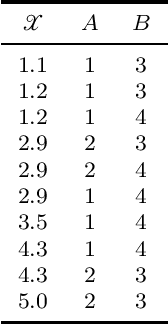
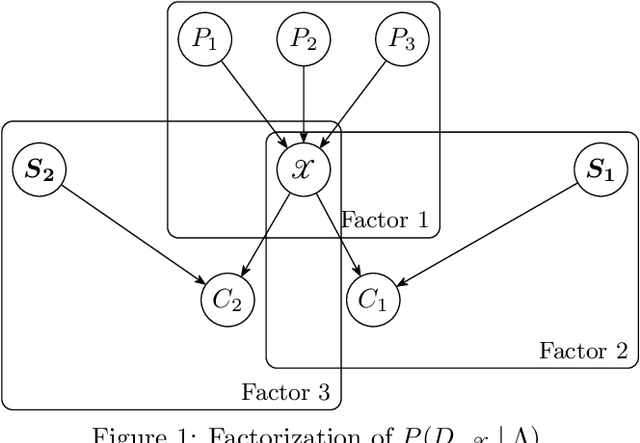
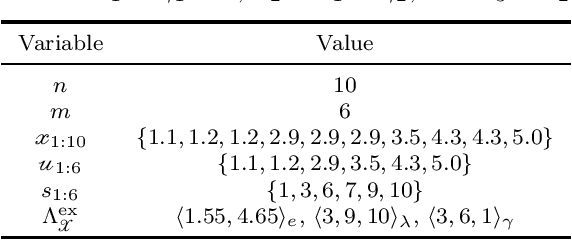

Learning Bayesian networks from raw data can help provide insights into the relationships between variables. While real data often contains a mixture of discrete and continuous-valued variables, many Bayesian network structure learning algorithms assume all random variables are discrete. Thus, continuous variables are often discretized when learning a Bayesian network. However, the choice of discretization policy has significant impact on the accuracy, speed, and interpretability of the resulting models. This paper introduces a principled Bayesian discretization method for continuous variables in Bayesian networks with quadratic complexity instead of the cubic complexity of other standard techniques. Empirical demonstrations show that the proposed method is superior to the established minimum description length algorithm. In addition, this paper shows how to incorporate existing methods into the structure learning process to discretize all continuous variables and simultaneously learn Bayesian network structures.
Deep Stochastic Radar Models
Jun 16, 2017

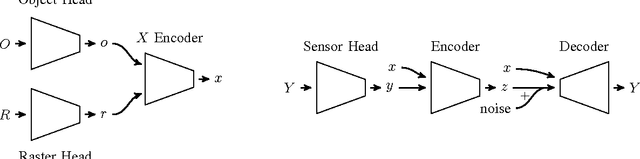

Accurate simulation and validation of advanced driver assistance systems requires accurate sensor models. Modeling automotive radar is complicated by effects such as multipath reflections, interference, reflective surfaces, discrete cells, and attenuation. Detailed radar simulations based on physical principles exist but are computationally intractable for realistic automotive scenes. This paper describes a methodology for the construction of stochastic automotive radar models based on deep learning with adversarial loss connected to real-world data. The resulting model exhibits fundamental radar effects while remaining real-time capable.