 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance-Driven Environment Abstraction with Multi-Timescale Learning
Jun 16, 2026We study performance-driven environment abstraction for decision-making in large Markov decision processes. Rather than preserving geometric or topological structure, we seek abstractions that directly optimize decision quality. We model abstraction as a controlled approximation obtained by aggregating the state space and enforcing a shared action distribution within each aggregated state. For a fixed partition, we establish a performance guarantee that separates value-function approximation error from the loss introduced by action sharing. Guided by this analysis, we develop a multi-timescale reinforcement learning framework that jointly adapts the policy and a tree-structured environment abstraction. The resulting algorithm refines and coarsens regions of the state space based on Q-value discrepancies, balancing performance against abstraction size and complexity. Empirical results demonstrate substantial state compression, improved sample efficiency, and faster replanning compared to actor-critic baselines.
Collaborative Navigation and Exploration with $β$-Sparse Gaussian Processes
May 25, 2026Collaborative navigation of heterogeneous robots in unknown environments poses significant challenges due to sensing, communication, and computational limitations. In this work, a lead robot navigates toward a target while a mobile sensor robot (e.g., a drone) assists by transmitting information about its locally observed environment under bandwidth constraints. We propose a framework that enables the sensor to jointly select its transmitted map points and navigation actions online, while also predicting unexplored regions of the environment. To this end, we present $β$-Sparse Gaussian Processes, a novel and robust variational sparse Gaussian Process model for task-aware inducing point selection. Furthermore, we develop an action-selection strategy that balances task relevance with exploration. Simulations on Mars and Earth maps show that the framework can reduce path cost by 18% relative to no communication and decrease transmitted information by 76% compared to raw-data transmission baselines.
Enhancing Robustness of Federated Learning via Server Learning
Apr 03, 2026This paper explores the use of server learning for enhancing the robustness of federated learning against malicious attacks even when clients' training data are not independent and identically distributed. We propose a heuristic algorithm that uses server learning and client update filtering in combination with geometric median aggregation. We demonstrate via experiments that this approach can achieve significant improvement in model accuracy even when the fraction of malicious clients is high, even more than $50\%$ in some cases, and the dataset utilized by the server is small and could be synthetic with its distribution not necessarily close to that of the clients' aggregated data.
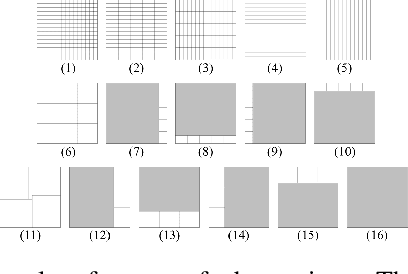
Communication-aware Hierarchical Map Compression of Time-Varying Environments for Mobile Robots
Apr 14, 2025In this paper, we develop a systematic framework for the time-sequential compression of dynamic probabilistic occupancy grids. Our approach leverages ideas from signal compression theory to formulate an optimization problem that searches for a multi-resolution hierarchical encoder that balances the quality of the compressed map (distortion) with its description size, the latter of which relates to the bandwidth required to reliably transmit the map to other agents or to store map estimates in on-board memory. The resulting optimization problem allows for multi-resolution map compressions to be obtained that satisfy available communication or memory resources, and does not require knowledge of the occupancy map dynamics. We develop an algorithm to solve our problem, and demonstrate the utility of the proposed framework in simulation on both static (i.e., non-time varying) and dynamic (time-varying) occupancy maps.
InterQ: A DQN Framework for Optimal Intermittent Control
Apr 12, 2025



In this letter, we explore the communication-control co-design of discrete-time stochastic linear systems through reinforcement learning. Specifically, we examine a closed-loop system involving two sequential decision-makers: a scheduler and a controller. The scheduler continuously monitors the system's state but transmits it to the controller intermittently to balance the communication cost and control performance. The controller, in turn, determines the control input based on the intermittently received information. Given the partially nested information structure, we show that the optimal control policy follows a certainty-equivalence form. Subsequently, we analyze the qualitative behavior of the scheduling policy. To develop the optimal scheduling policy, we propose InterQ, a deep reinforcement learning algorithm which uses a deep neural network to approximate the Q-function. Through extensive numerical evaluations, we analyze the scheduling landscape and further compare our approach against two baseline strategies: (a) a multi-period periodic scheduling policy, and (b) an event-triggered policy. The results demonstrate that our proposed method outperforms both baselines. The open source implementation can be found at https://github.com/AC-sh/InterQ.
On Model Protection in Federated Learning against Eavesdropping Attacks
Apr 02, 2025In this study, we investigate the protection offered by federated learning algorithms against eavesdropping adversaries. In our model, the adversary is capable of intercepting model updates transmitted from clients to the server, enabling it to create its own estimate of the model. Unlike previous research, which predominantly focuses on safeguarding client data, our work shifts attention protecting the client model itself. Through a theoretical analysis, we examine how various factors, such as the probability of client selection, the structure of local objective functions, global aggregation at the server, and the eavesdropper's capabilities, impact the overall level of protection. We further validate our findings through numerical experiments, assessing the protection by evaluating the model accuracy achieved by the adversary. Finally, we compare our results with methods based on differential privacy, underscoring their limitations in this specific context.
Communication-Aware Iterative Map Compression for Online Path-Planning
Mar 13, 2025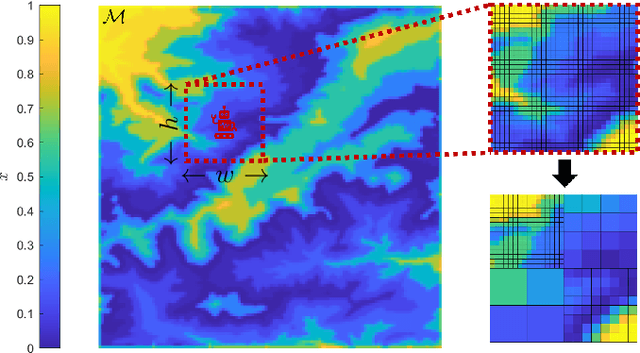
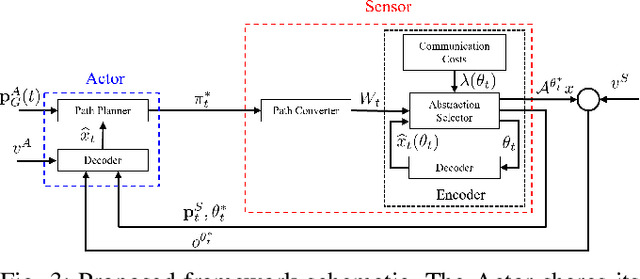
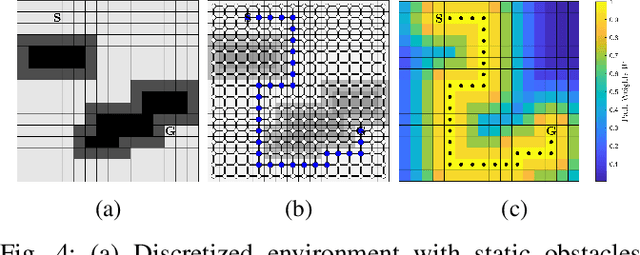
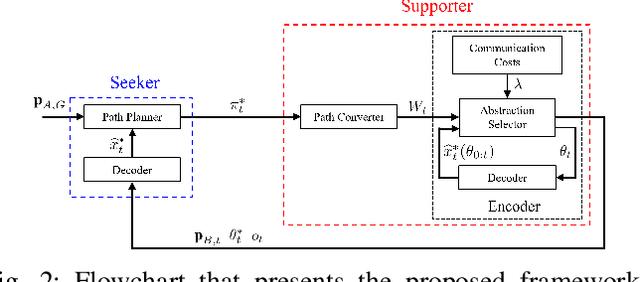
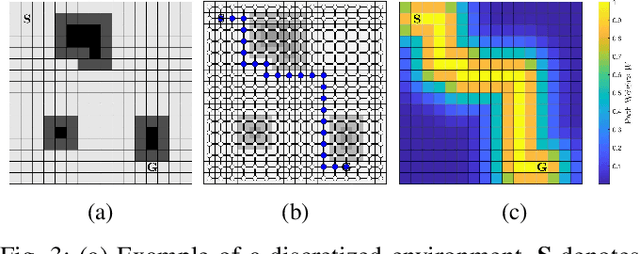
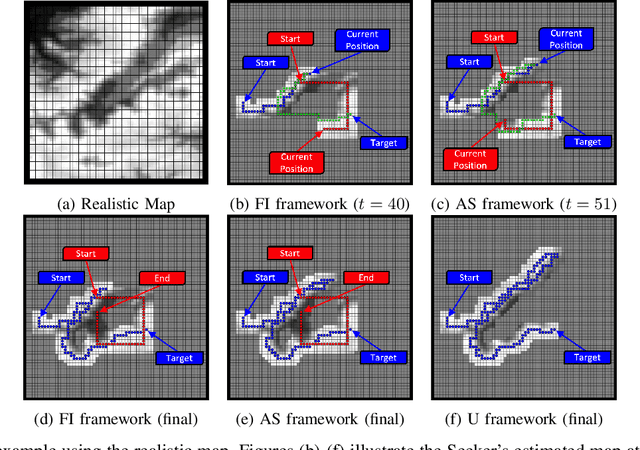
This paper addresses the problem of optimizing communicated information among heterogeneous, resource-aware robot teams to facilitate their navigation. In such operations, a mobile robot compresses its local map to assist another robot in reaching a target within an uncharted environment. The primary challenge lies in ensuring that the map compression step balances network load while transmitting only the most essential information for effective navigation. We propose a communication framework that sequentially selects the optimal map compression in a task-driven, communication-aware manner. It introduces a decoder capable of iterative map estimation, handling noise through Kalman filter techniques. The computational speed of our decoder allows for a larger compression template set compared to previous methods, and enables applications in more challenging environments. Specifically, our simulations demonstrate a remarkable 98% reduction in communicated information, compared to a framework that transmits the raw data, on a large Mars inclination map and an Earth map, all while maintaining similar planning costs. Furthermore, our method significantly reduces computational time compared to the state-of-the-art approach.
Multi-agent Task-Driven Exploration via Intelligent Map Compression and Sharing
Mar 21, 2024



This paper investigates the task-driven exploration of unknown environments with mobile sensors communicating compressed measurements. The sensors explore the area and transmit their compressed data to another robot, assisting it in reaching a goal location. We propose a novel communication framework and a tractable multi-agent exploration algorithm to select the sensors' actions. The algorithm uses a task-driven measure of uncertainty, resulting from map compression, as a reward function. We validate the efficacy of our algorithm through numerical simulations conducted on a realistic map and compare it with two alternative approaches. The results indicate that the proposed algorithm effectively decreases the time required for the robot to reach its target without causing excessive load on the communication network.
Communication-Aware Map Compression for Online Path-Planning
Sep 23, 2023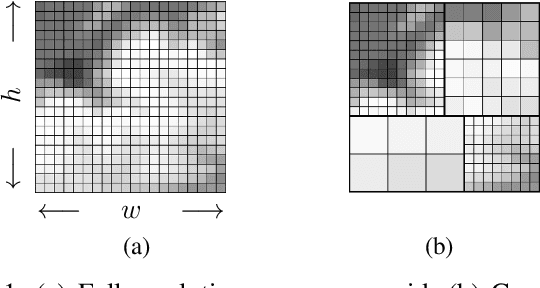
This paper addresses the problem of the communication of optimally compressed information for mobile robot path-planning. In this context, mobile robots compress their current local maps to assist another robot in reaching a target in an unknown environment. We propose a framework that sequentially selects the optimal compression, guided by the robot's path, by balancing the map resolution and communication cost. Our approach is tractable in close-to-real scenarios and does not necessitate prior environment knowledge. We design a novel decoder that leverages compressed information to estimate the unknown environment via convex optimization with linear constraints and an encoder that utilizes the decoder to select the optimal compression. Numerical simulations are conducted in a large close-to-real map and a maze map and compared with two alternative approaches. The results confirm the effectiveness of our framework in assisting the robot reach its target by reducing transmitted information, on average, by approximately 50% while maintaining satisfactory performance.
Target Defense against Periodically Arriving Intruders
Mar 09, 2023We consider a variant of pursuit-evasion games where a single defender is tasked to defend a static target from a sequence of periodically arriving intruders. The intruders' objective is to breach the boundary of a circular target without being captured and the defender's objective is to capture as many intruders as possible. At the beginning of each period, a new intruder appears at a random location on the perimeter of a fixed circle surrounding the target and moves radially towards the target center to breach the target. The intruders are slower in speed compared to the defender and they have their own sensing footprint through which they can perfectly detect the defender if it is within their sensing range. Considering the speed and sensing limitations of the agents, we analyze the entire game by dividing it into partial information and full information phases. We address the defender's capturability using the notions of engagement surface and capture circle. We develop and analyze three efficient strategies for the defender and derive a lower bound on the capture fraction. Finally, we conduct a series of simulations and numerical experiments to compare and contrast the three proposed approaches.