 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Event-Triggered Distance-Based Formation Control for Multi-Agent Systems
Sep 15, 2025This paper addresses the problem of collaborative formation control for multi-agent systems with limited resources. We consider a team of robots tasked with achieving a desired formation from arbitrary initial configurations. To reduce unnecessary control updates and conserve resources, we propose a distributed event-triggered formation controller that relies on inter-agent distance measurements. Control updates are triggered only when the measurement error exceeds a predefined threshold, ensuring system stability. The proposed controller is validated through extensive simulations and real-world experiments involving different formations, communication topologies, scalability tests, and variations in design parameters, while also being compared against periodic triggering strategies. Results demonstrate that the event-triggered approach significantly reduces control efforts while preserving formation performance.
HCOA*: Hierarchical Class-ordered A* for Navigation in Semantic Environments
May 06, 2025This paper addresses the problem of robot navigation in mixed geometric and semantic 3D environments. Given a hierarchical representation of the environment, the objective is to navigate from a start position to a goal while minimizing the computational cost. We introduce Hierarchical Class-ordered A* (HCOA*), an algorithm that leverages the environmental hierarchy for efficient path-planning in semantic graphs, significantly reducing computational effort. We use a total order over the semantic classes and prove theoretical performance guarantees for the algorithm. We propose two approaches for higher-layer node classification based on the node semantics of the lowest layer: a Graph Neural Network-based method and a Majority-Class method. We evaluate our approach through simulations on a 3D Scene Graph (3DSG), comparing it to the state-of-the-art and assessing its performance against our classification approaches. Results show that HCOA* can find the optimal path while reducing the number of expanded nodes by 25% and achieving a 16% reduction in computational time on the uHumans2 3DSG dataset.
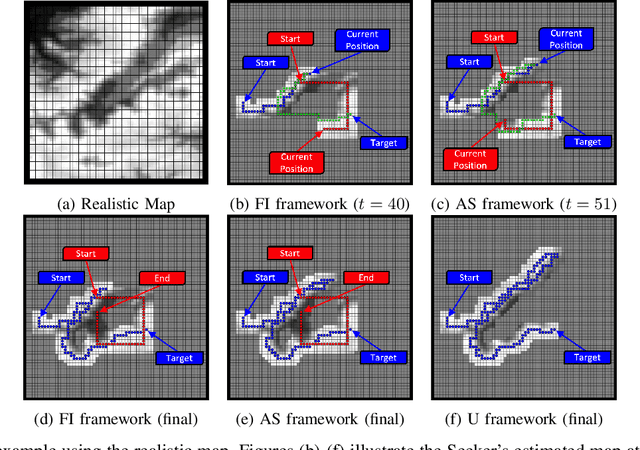
Communication-Aware Iterative Map Compression for Online Path-Planning
Mar 13, 2025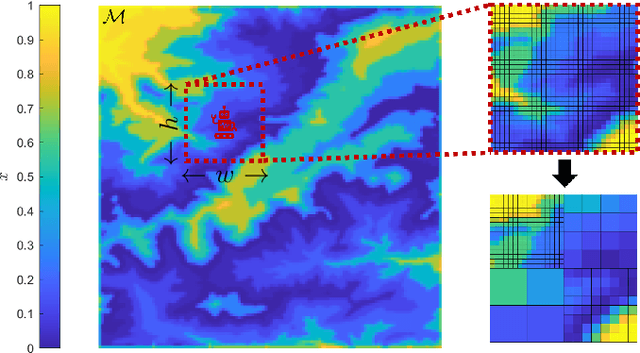
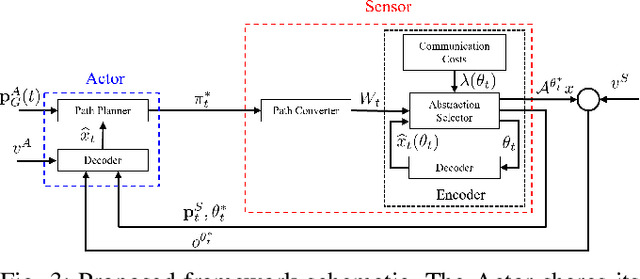
This paper addresses the problem of optimizing communicated information among heterogeneous, resource-aware robot teams to facilitate their navigation. In such operations, a mobile robot compresses its local map to assist another robot in reaching a target within an uncharted environment. The primary challenge lies in ensuring that the map compression step balances network load while transmitting only the most essential information for effective navigation. We propose a communication framework that sequentially selects the optimal map compression in a task-driven, communication-aware manner. It introduces a decoder capable of iterative map estimation, handling noise through Kalman filter techniques. The computational speed of our decoder allows for a larger compression template set compared to previous methods, and enables applications in more challenging environments. Specifically, our simulations demonstrate a remarkable 98% reduction in communicated information, compared to a framework that transmits the raw data, on a large Mars inclination map and an Earth map, all while maintaining similar planning costs. Furthermore, our method significantly reduces computational time compared to the state-of-the-art approach.
Multi-agent Task-Driven Exploration via Intelligent Map Compression and Sharing
Mar 21, 2024



This paper investigates the task-driven exploration of unknown environments with mobile sensors communicating compressed measurements. The sensors explore the area and transmit their compressed data to another robot, assisting it in reaching a goal location. We propose a novel communication framework and a tractable multi-agent exploration algorithm to select the sensors' actions. The algorithm uses a task-driven measure of uncertainty, resulting from map compression, as a reward function. We validate the efficacy of our algorithm through numerical simulations conducted on a realistic map and compare it with two alternative approaches. The results indicate that the proposed algorithm effectively decreases the time required for the robot to reach its target without causing excessive load on the communication network.
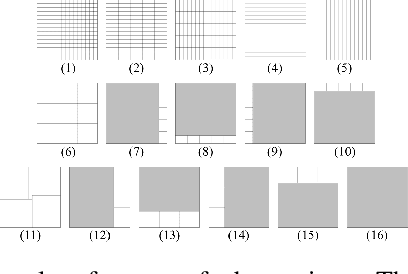
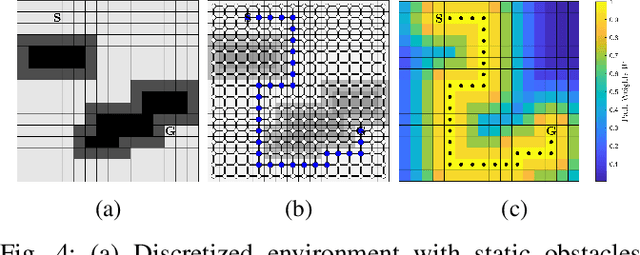
Communication-Aware Map Compression for Online Path-Planning
Sep 23, 2023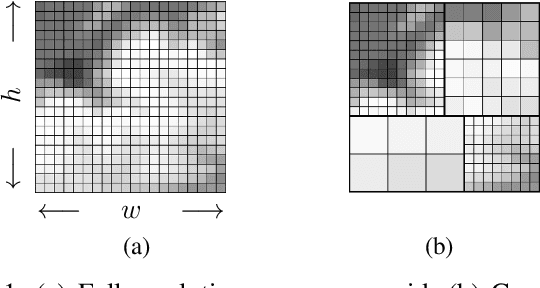
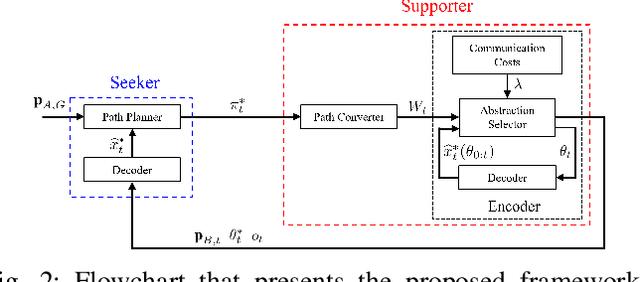
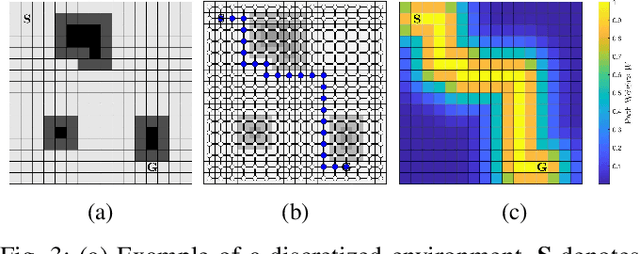
This paper addresses the problem of the communication of optimally compressed information for mobile robot path-planning. In this context, mobile robots compress their current local maps to assist another robot in reaching a target in an unknown environment. We propose a framework that sequentially selects the optimal compression, guided by the robot's path, by balancing the map resolution and communication cost. Our approach is tractable in close-to-real scenarios and does not necessitate prior environment knowledge. We design a novel decoder that leverages compressed information to estimate the unknown environment via convex optimization with linear constraints and an encoder that utilizes the decoder to select the optimal compression. Numerical simulations are conducted in a large close-to-real map and a maze map and compared with two alternative approaches. The results confirm the effectiveness of our framework in assisting the robot reach its target by reducing transmitted information, on average, by approximately 50% while maintaining satisfactory performance.