 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Quadratic Guidance Law for Joint Motion Planning of a Pursuer-Turret Assembly
Mar 22, 2024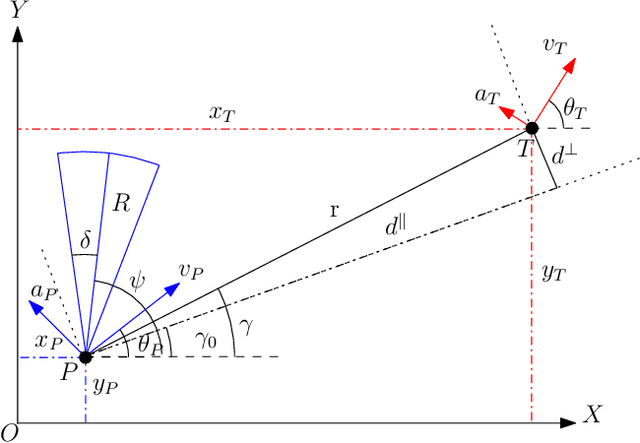
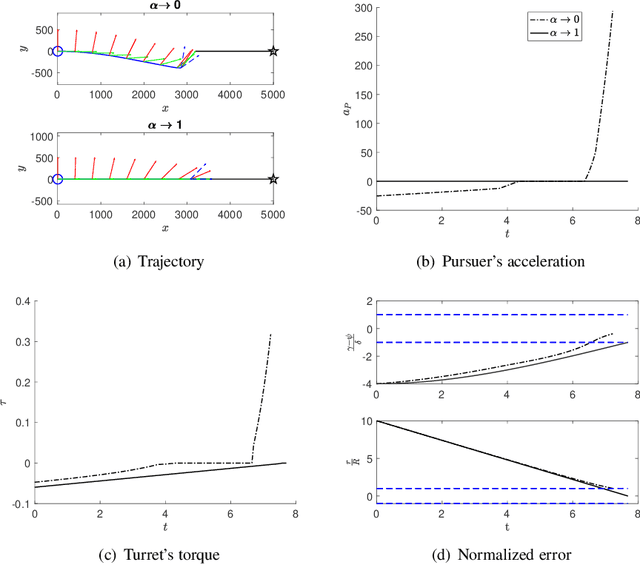
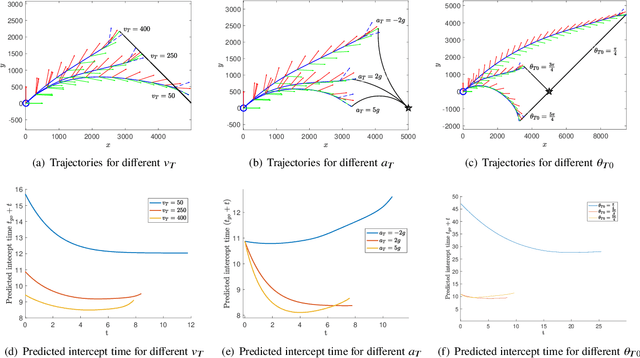
This paper presents joint motion planning of a vehicle with an attached rotating turret. The turret has a limited range as well as the field of view. The objective is capture a maneuvering target such that at the terminal time it is withing the field-of-view and range limits. Catering to it, we present a minimum effort guidance law that commensurate for the turn rate abilities of the vehicle and the turret. The guidance law is obtained using linearization about the collision triangle and admits an analytical solution. Simulation results are presented to exemplify the cooperation between the turret and the vehicle.
Target Defense against Sequentially Arriving Intruders
Dec 13, 2022

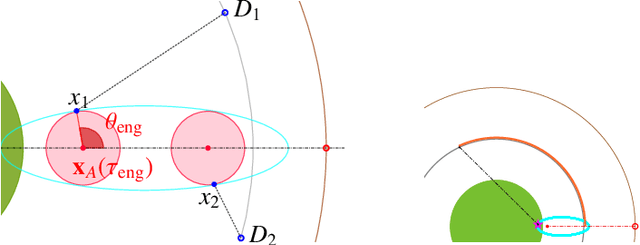

We consider a variant of the target defense problem where a single defender is tasked to capture a sequence of incoming intruders. The intruders' objective is to breach the target boundary without being captured by the defender. As soon as the current intruder breaches the target or gets captured by the defender, the next intruder appears at a random location on a fixed circle surrounding the target. Therefore, the defender's final location at the end of the current game becomes its initial location for the next game. Thus, the players pick strategies that are advantageous for the current as well as for the future games. Depending on the information available to the players, each game is divided into two phases: partial information and full information phase. Under some assumptions on the sensing and speed capabilities, we analyze the agents' strategies in both phases. We derive equilibrium strategies for both the players to optimize the capture percentage using the notions of engagement surface and capture circle. We quantify the percentage of capture for both finite and infinite sequences of incoming intruders.