Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Quadratic Guidance Law for Joint Motion Planning of a Pursuer-Turret Assembly
Paper and Code
Mar 22, 2024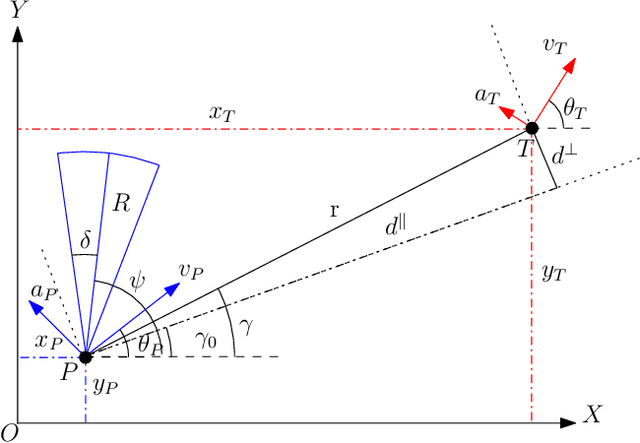
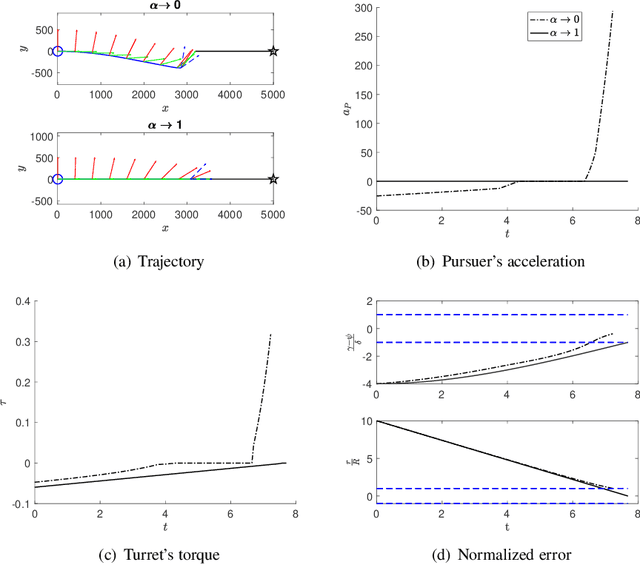
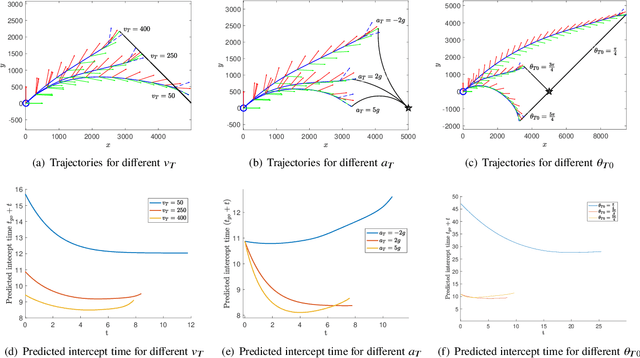
This paper presents joint motion planning of a vehicle with an attached rotating turret. The turret has a limited range as well as the field of view. The objective is capture a maneuvering target such that at the terminal time it is withing the field-of-view and range limits. Catering to it, we present a minimum effort guidance law that commensurate for the turn rate abilities of the vehicle and the turret. The guidance law is obtained using linearization about the collision triangle and admits an analytical solution. Simulation results are presented to exemplify the cooperation between the turret and the vehicle.
View paper on