 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandheld Mobile Photography in Very Low Light
Oct 24, 2019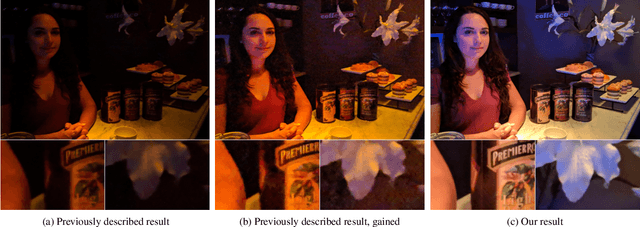



Taking photographs in low light using a mobile phone is challenging and rarely produces pleasing results. Aside from the physical limits imposed by read noise and photon shot noise, these cameras are typically handheld, have small apertures and sensors, use mass-produced analog electronics that cannot easily be cooled, and are commonly used to photograph subjects that move, like children and pets. In this paper we describe a system for capturing clean, sharp, colorful photographs in light as low as 0.3~lux, where human vision becomes monochromatic and indistinct. To permit handheld photography without flash illumination, we capture, align, and combine multiple frames. Our system employs "motion metering", which uses an estimate of motion magnitudes (whether due to handshake or moving objects) to identify the number of frames and the per-frame exposure times that together minimize both noise and motion blur in a captured burst. We combine these frames using robust alignment and merging techniques that are specialized for high-noise imagery. To ensure accurate colors in such low light, we employ a learning-based auto white balancing algorithm. To prevent the photographs from looking like they were shot in daylight, we use tone mapping techniques inspired by illusionistic painting: increasing contrast, crushing shadows to black, and surrounding the scene with darkness. All of these processes are performed using the limited computational resources of a mobile device. Our system can be used by novice photographers to produce shareable pictures in a few seconds based on a single shutter press, even in environments so dim that humans cannot see clearly.
* 22 pages, 27 figures
Unprocessing Images for Learned Raw Denoising
Nov 27, 2018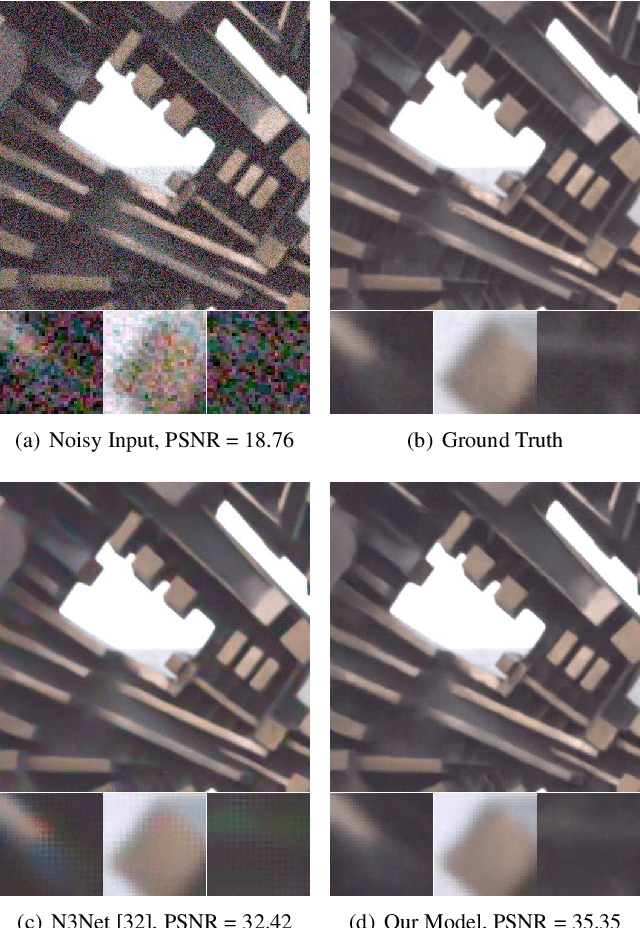
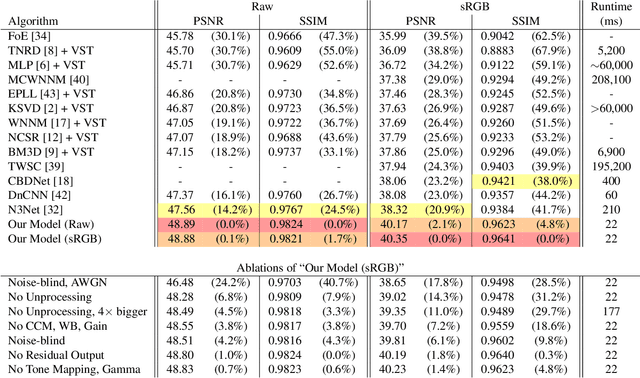

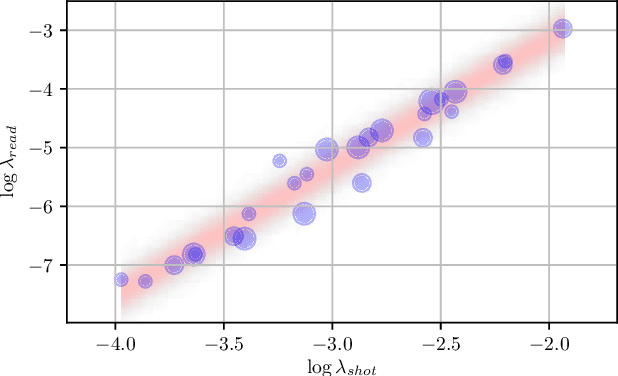
Machine learning techniques work best when the data used for training resembles the data used for evaluation. This holds true for learned single-image denoising algorithms, which are applied to real raw camera sensor readings but, due to practical constraints, are often trained on synthetic image data. Though it is understood that generalizing from synthetic to real data requires careful consideration of the noise properties of image sensors, the other aspects of a camera's image processing pipeline (gain, color correction, tone mapping, etc) are often overlooked, despite their significant effect on how raw measurements are transformed into finished images. To address this, we present a technique to "unprocess" images by inverting each step of an image processing pipeline, thereby allowing us to synthesize realistic raw sensor measurements from commonly available internet photos. We additionally model the relevant components of an image processing pipeline when evaluating our loss function, which allows training to be aware of all relevant photometric processing that will occur after denoising. By processing and unprocessing model outputs and training data in this way, we are able to train a simple convolutional neural network that has 14%-38% lower error rates and is 9x-18x faster than the previous state of the art on the Darmstadt Noise Dataset, and generalizes to sensors outside of that dataset as well.
Burst Denoising with Kernel Prediction Networks
Mar 29, 2018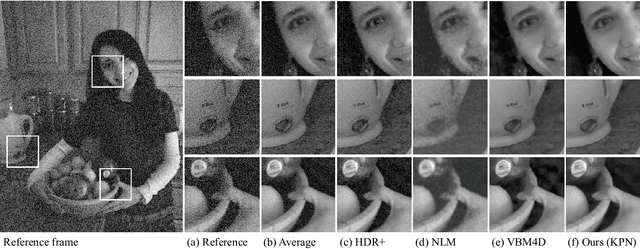
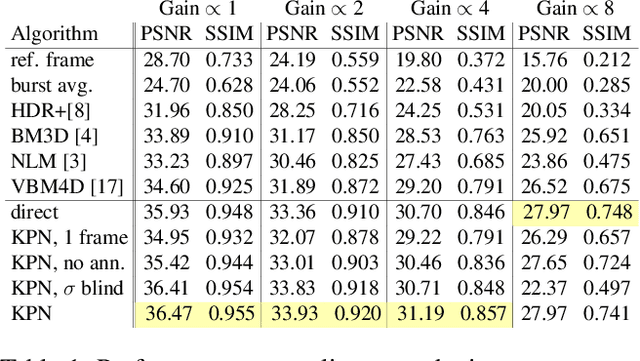
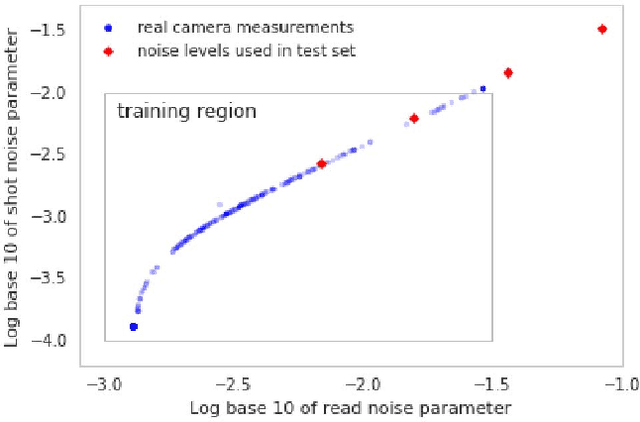
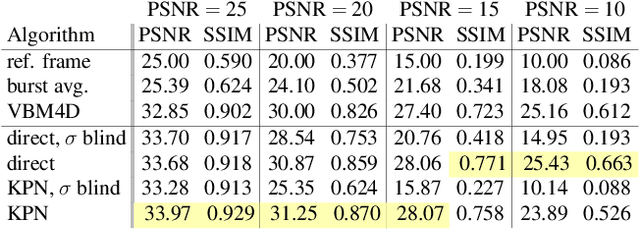
We present a technique for jointly denoising bursts of images taken from a handheld camera. In particular, we propose a convolutional neural network architecture for predicting spatially varying kernels that can both align and denoise frames, a synthetic data generation approach based on a realistic noise formation model, and an optimization guided by an annealed loss function to avoid undesirable local minima. Our model matches or outperforms the state-of-the-art across a wide range of noise levels on both real and synthetic data.