 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor Misalignment-tolerant AUV Navigation with Passive DoA and Doppler Measurements
Feb 11, 2024



We present a sensor misalignment-tolerant AUV navigation method that leverages measurements from an acoustic array and dead reckoned information. Recent studies have demonstrated the potential use of passive acoustic Direction of Arrival (DoA) measurements for AUV navigation without requiring ranging measurements. However, the sensor misalignment between the acoustic array and the attitude sensor was not accounted for. Such misalignment may deteriorate the navigation accuracy. This paper proposes a novel approach that allows simultaneous AUV navigation, beacon localization, and sensor alignment. An Unscented Kalman Filter (UKF) that enables the necessary calculations to be completed at an affordable computational load is developed. A Nonlinear Least Squares (NLS)-based technique is employed to find an initial solution for beacon localization and sensor alignment as early as possible using a short-term window of measurements. Experimental results demonstrate the performance of the proposed method.
OceanGPT: A Large Language Model for Ocean Science Tasks
Oct 19, 2023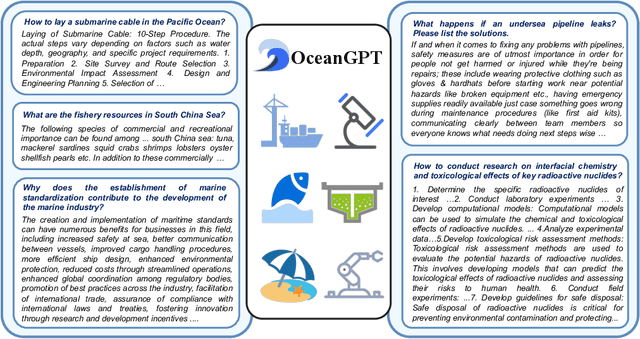
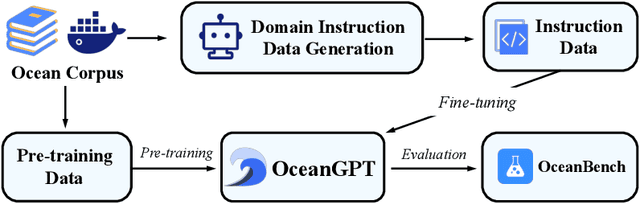

Ocean science, which delves into the oceans that are reservoirs of life and biodiversity, is of great significance given that oceans cover over 70% of our planet's surface. Recently, advances in Large Language Models (LLMs) have transformed the paradigm in science. Despite the success in other domains, current LLMs often fall short in catering to the needs of domain experts like oceanographers, and the potential of LLMs for ocean science is under-explored. The intrinsic reason may be the immense and intricate nature of ocean data as well as the necessity for higher granularity and richness in knowledge. To alleviate these issues, we introduce OceanGPT, the first-ever LLM in the ocean domain, which is expert in various ocean science tasks. We propose DoInstruct, a novel framework to automatically obtain a large volume of ocean domain instruction data, which generates instructions based on multi-agent collaboration. Additionally, we construct the first oceanography benchmark, OceanBench, to evaluate the capabilities of LLMs in the ocean domain. Though comprehensive experiments, OceanGPT not only shows a higher level of knowledge expertise for oceans science tasks but also gains preliminary embodied intelligence capabilities in ocean technology. Codes, data and checkpoints will soon be available at https://github.com/zjunlp/KnowLM.
Probabilistic Learning Vector Quantization on Manifold of Symmetric Positive Definite Matrices
Feb 01, 2021
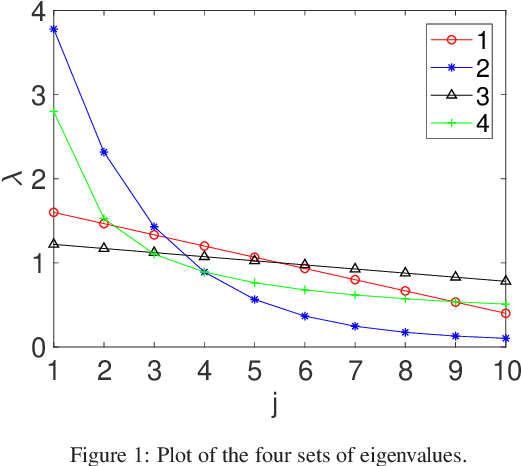
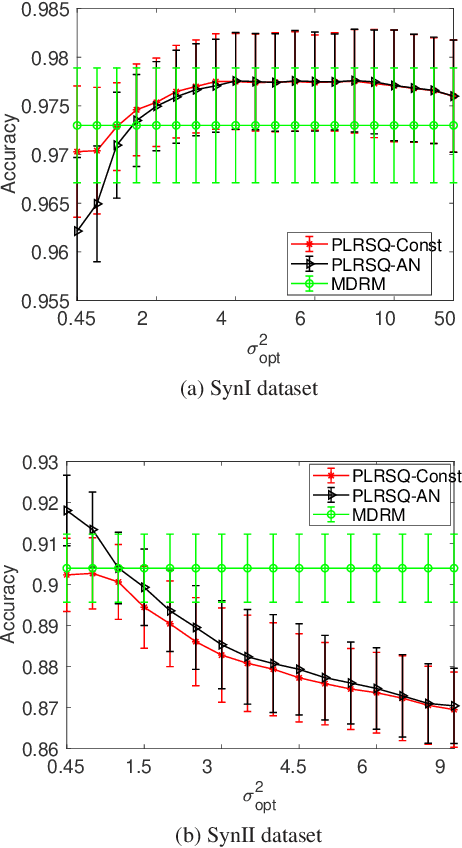

In this paper, we develop a new classification method for manifold-valued data in the framework of probabilistic learning vector quantization. In many classification scenarios, the data can be naturally represented by symmetric positive definite matrices, which are inherently points that live on a curved Riemannian manifold. Due to the non-Euclidean geometry of Riemannian manifolds, traditional Euclidean machine learning algorithms yield poor results on such data. In this paper, we generalize the probabilistic learning vector quantization algorithm for data points living on the manifold of symmetric positive definite matrices equipped with Riemannian natural metric (affine-invariant metric). By exploiting the induced Riemannian distance, we derive the probabilistic learning Riemannian space quantization algorithm, obtaining the learning rule through Riemannian gradient descent. Empirical investigations on synthetic data, image data , and motor imagery EEG data demonstrate the superior performance of the proposed method.