 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplexity of Classical Acceleration for $\ell_1$-Regularized PageRank
Feb 24, 2026We study the degree-weighted work required to compute $\ell_1$-regularized PageRank using the standard one-gradient-per-iteration accelerated proximal-gradient method (FISTA). For non-accelerated local methods, the best known worst-case work scales as $\widetilde{O} ((αρ)^{-1})$, where $α$ is the teleportation parameter and $ρ$ is the $\ell_1$-regularization parameter. A natural question is whether FISTA can improve the dependence on $α$ from $1/α$ to $1/\sqrtα$ while preserving the $1/ρ$ locality scaling. The challenge is that acceleration can break locality by transiently activating nodes that are zero at optimality, thereby increasing the cost of gradient evaluations. We analyze FISTA on a slightly over-regularized objective and show that, under a checkable confinement condition, all spurious activations remain inside a boundary set $\mathcal{B}$. This yields a bound consisting of an accelerated $(ρ\sqrtα)^{-1}\log(α/\varepsilon)$ term plus a boundary overhead $\sqrt{vol(\mathcal{B})}/(ρα^{3/2})$. We provide graph-structural conditions that imply such confinement. Experiments on synthetic and real graphs show the resulting speedup and slowdown regimes under the degree-weighted work model.
Smooth Quasar-Convex Optimization with Constraints
Oct 02, 2025
Quasar-convex functions form a broad nonconvex class with applications to linear dynamical systems, generalized linear models, and Riemannian optimization, among others. Current nearly optimal algorithms work only in affine spaces due to the loss of one degree of freedom when working with general convex constraints. Obtaining an accelerated algorithm that makes nearly optimal $\widetilde{O}(1/(\gamma\sqrt{\epsilon}))$ first-order queries to a $\gamma$-quasar convex smooth function \emph{with constraints} was independently asked as an open problem in Mart\'inez-Rubio (2022); Lezane, Langer, and Koolen (2024). In this work, we solve this question by designing an inexact accelerated proximal point algorithm that we implement using a first-order method achieving the aforementioned rate and, as a consequence, we improve the complexity of the accelerated geodesically Riemannian optimization solution in Mart\'inez-Rubio (2022). We also analyze projected gradient descent and Frank-Wolfe algorithms in this constrained quasar-convex setting. To the best of our knowledge, our work provides the first analyses of first-order methods for quasar-convex smooth functions with general convex constraints.
On the necessity of adaptive regularisation:Optimal anytime online learning on $\boldsymbol{\ell_p}$-balls
Jun 24, 2025We study online convex optimization on $\ell_p$-balls in $\mathbb{R}^d$ for $p > 2$. While always sub-linear, the optimal regret exhibits a shift between the high-dimensional setting ($d > T$), when the dimension $d$ is greater than the time horizon $T$ and the low-dimensional setting ($d \leq T$). We show that Follow-the-Regularised-Leader (FTRL) with time-varying regularisation which is adaptive to the dimension regime is anytime optimal for all dimension regimes. Motivated by this, we ask whether it is possible to obtain anytime optimality of FTRL with fixed non-adaptive regularisation. Our main result establishes that for separable regularisers, adaptivity in the regulariser is necessary, and that any fixed regulariser will be sub-optimal in one of the two dimension regimes. Finally, we provide lower bounds which rule out sub-linear regret bounds for the linear bandit problem in sufficiently high-dimension for all $\ell_p$-balls with $p \geq 1$.
Linear Convergence of the Frank-Wolfe Algorithm over Product Polytopes
May 16, 2025We study the linear convergence of Frank-Wolfe algorithms over product polytopes. We analyze two condition numbers for the product polytope, namely the \emph{pyramidal width} and the \emph{vertex-facet distance}, based on the condition numbers of individual polytope components. As a result, for convex objectives that are $\mu$-Polyak-{\L}ojasiewicz, we show linear convergence rates quantified in terms of the resulting condition numbers. We apply our results to the problem of approximately finding a feasible point in a polytope intersection in high-dimensions, and demonstrate the practical efficiency of our algorithms through empirical results.
Implicit Riemannian Optimism with Applications to Min-Max Problems
Jan 30, 2025



We introduce a Riemannian optimistic online learning algorithm for Hadamard manifolds based on inexact implicit updates. Unlike prior work, our method can handle in-manifold constraints, and matches the best known regret bounds in the Euclidean setting with no dependence on geometric constants, like the minimum curvature. Building on this, we develop algorithms for g-convex, g-concave smooth min-max problems on Hadamard manifolds. Notably, one method nearly matches the gradient oracle complexity of the lower bound for Euclidean problems, for the first time.
Beyond Short Steps in Frank-Wolfe Algorithms
Jan 30, 2025



We introduce novel techniques to enhance Frank-Wolfe algorithms by leveraging function smoothness beyond traditional short steps. Our study focuses on Frank-Wolfe algorithms with step sizes that incorporate primal-dual guarantees, offering practical stopping criteria. We present a new Frank-Wolfe algorithm utilizing an optimistic framework and provide a primal-dual convergence proof. Additionally, we propose a generalized short-step strategy aimed at optimizing a computable primal-dual gap. Interestingly, this new generalized short-step strategy is also applicable to gradient descent algorithms beyond Frank-Wolfe methods. As a byproduct, our work revisits and refines primal-dual techniques for analyzing Frank-Wolfe algorithms, achieving tighter primal-dual convergence rates. Empirical results demonstrate that our optimistic algorithm outperforms existing methods, highlighting its practical advantages.
Black-Box Uniform Stability for Non-Euclidean Empirical Risk Minimization
Dec 20, 2024
We study first-order algorithms that are uniformly stable for empirical risk minimization (ERM) problems that are convex and smooth with respect to $p$-norms, $p \geq 1$. We propose a black-box reduction method that, by employing properties of uniformly convex regularizers, turns an optimization algorithm for H\"older smooth convex losses into a uniformly stable learning algorithm with optimal statistical risk bounds on the excess risk, up to a constant factor depending on $p$. Achieving a black-box reduction for uniform stability was posed as an open question by (Attia and Koren, 2022), which had solved the Euclidean case $p=2$. We explore applications that leverage non-Euclidean geometry in addressing binary classification problems.
Non-Euclidean High-Order Smooth Convex Optimization
Nov 13, 2024We develop algorithms for the optimization of convex objectives that have H\"older continuous $q$-th derivatives with respect to a $p$-norm by using a $q$-th order oracle, for $p, q \geq 1$. We can also optimize other structured functions. We do this by developing a non-Euclidean inexact accelerated proximal point method that makes use of an inexact uniformly convex regularizer. We also provide nearly matching lower bounds for any deterministic algorithm that interacts with the function via a local oracle.
Accelerated Methods for Riemannian Min-Max Optimization Ensuring Bounded Geometric Penalties
May 25, 2023

In this work, we study optimization problems of the form $\min_x \max_y f(x, y)$, where $f(x, y)$ is defined on a product Riemannian manifold $\mathcal{M} \times \mathcal{N}$ and is $\mu_x$-strongly geodesically convex (g-convex) in $x$ and $\mu_y$-strongly g-concave in $y$, for $\mu_x, \mu_y \geq 0$. We design accelerated methods when $f$ is $(L_x, L_y, L_{xy})$-smooth and $\mathcal{M}$, $\mathcal{N}$ are Hadamard. To that aim we introduce new g-convex optimization results, of independent interest: we show global linear convergence for metric-projected Riemannian gradient descent and improve existing accelerated methods by reducing geometric constants. Additionally, we complete the analysis of two previous works applying to the Riemannian min-max case by removing an assumption about iterates staying in a pre-specified compact set.
Accelerated Riemannian Optimization: Handling Constraints with a Prox to Bound Geometric Penalties
Nov 26, 2022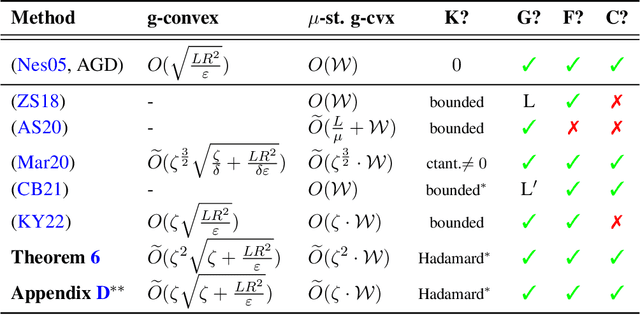
We propose a globally-accelerated, first-order method for the optimization of smooth and (strongly or not) geodesically-convex functions in a wide class of Hadamard manifolds. We achieve the same convergence rates as Nesterov's accelerated gradient descent, up to a multiplicative geometric penalty and log factors. Crucially, we can enforce our method to stay within a compact set we define. Prior fully accelerated works \textit{resort to assuming} that the iterates of their algorithms stay in some pre-specified compact set, except for two previous methods of limited applicability. For our manifolds, this solves the open question in [KY22] about obtaining global general acceleration without iterates assumptively staying in the feasible set.