 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaGNNarok: A Light-Weight Graph Neural Network for Enhancing Radar Point Clouds on Unmanned Ground Vehicles
Jul 01, 2025Low-cost indoor mobile robots have gained popularity with the increasing adoption of automation in homes and commercial spaces. However, existing lidar and camera-based solutions have limitations such as poor performance in visually obscured environments, high computational overhead for data processing, and high costs for lidars. In contrast, mmWave radar sensors offer a cost-effective and lightweight alternative, providing accurate ranging regardless of visibility. However, existing radar-based localization suffers from sparse point cloud generation, noise, and false detections. Thus, in this work, we introduce RaGNNarok, a real-time, lightweight, and generalizable graph neural network (GNN)-based framework to enhance radar point clouds, even in complex and dynamic environments. With an inference time of just 7.3 ms on the low-cost Raspberry Pi 5, RaGNNarok runs efficiently even on such resource-constrained devices, requiring no additional computational resources. We evaluate its performance across key tasks, including localization, SLAM, and autonomous navigation, in three different environments. Our results demonstrate strong reliability and generalizability, making RaGNNarok a robust solution for low-cost indoor mobile robots.
From Low Field to High Value: Robust Cortical Mapping from Low-Field MRI
May 18, 2025Three-dimensional reconstruction of cortical surfaces from MRI for morphometric analysis is fundamental for understanding brain structure. While high-field MRI (HF-MRI) is standard in research and clinical settings, its limited availability hinders widespread use. Low-field MRI (LF-MRI), particularly portable systems, offers a cost-effective and accessible alternative. However, existing cortical surface analysis tools are optimized for high-resolution HF-MRI and struggle with the lower signal-to-noise ratio and resolution of LF-MRI. In this work, we present a machine learning method for 3D reconstruction and analysis of portable LF-MRI across a range of contrasts and resolutions. Our method works "out of the box" without retraining. It uses a 3D U-Net trained on synthetic LF-MRI to predict signed distance functions of cortical surfaces, followed by geometric processing to ensure topological accuracy. We evaluate our method using paired HF/LF-MRI scans of the same subjects, showing that LF-MRI surface reconstruction accuracy depends on acquisition parameters, including contrast type (T1 vs T2), orientation (axial vs isotropic), and resolution. A 3mm isotropic T2-weighted scan acquired in under 4 minutes, yields strong agreement with HF-derived surfaces: surface area correlates at r=0.96, cortical parcellations reach Dice=0.98, and gray matter volume achieves r=0.93. Cortical thickness remains more challenging with correlations up to r=0.70, reflecting the difficulty of sub-mm precision with 3mm voxels. We further validate our method on challenging postmortem LF-MRI, demonstrating its robustness. Our method represents a step toward enabling cortical surface analysis on portable LF-MRI. Code is available at https://surfer.nmr.mgh.harvard.edu/fswiki/ReconAny
Probabilistic Segmentation for Robust Field of View Estimation
Mar 10, 2025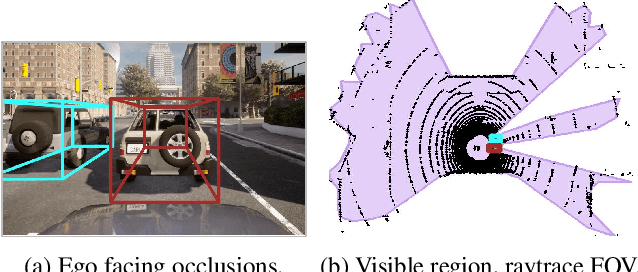
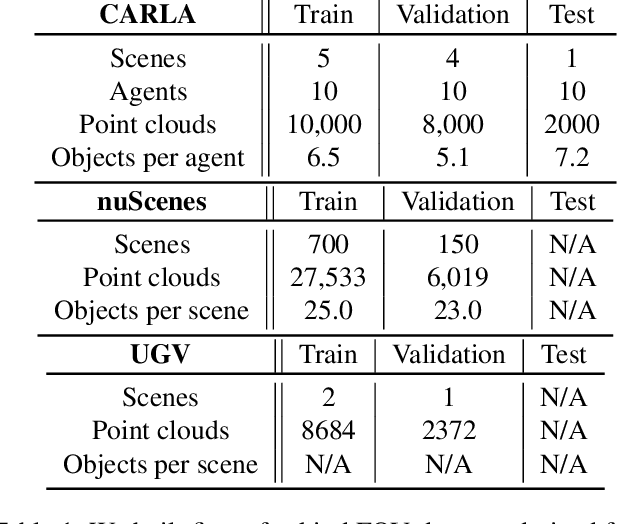
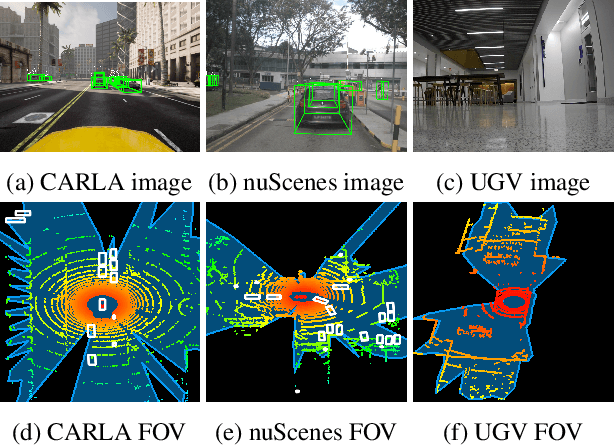
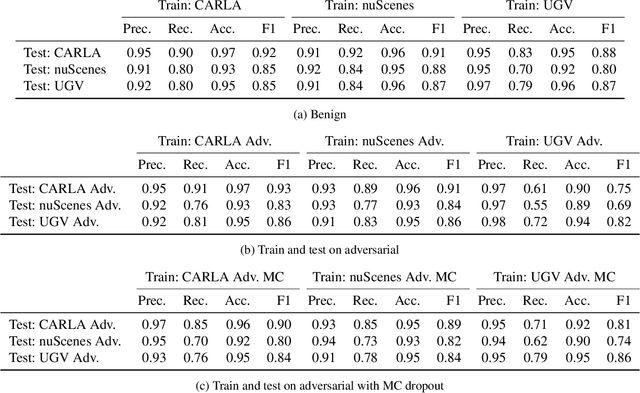
Attacks on sensing and perception threaten the safe deployment of autonomous vehicles (AVs). Security-aware sensor fusion helps mitigate threats but requires accurate field of view (FOV) estimation which has not been evaluated autonomy. To address this gap, we adapt classical computer graphics algorithms to develop the first autonomy-relevant FOV estimators and create the first datasets with ground truth FOV labels. Unfortunately, we find that these approaches are themselves highly vulnerable to attacks on sensing. To improve robustness of FOV estimation against attacks, we propose a learning-based segmentation model that captures FOV features, integrates Monte Carlo dropout (MCD) for uncertainty quantification, and performs anomaly detection on confidence maps. We illustrate through comprehensive evaluations attack resistance and strong generalization across environments. Architecture trade studies demonstrate the model is feasible for real-time deployment in multiple applications.
RadCloud: Real-Time High-Resolution Point Cloud Generation Using Low-Cost Radars for Aerial and Ground Vehicles
Mar 09, 2024



In this work, we present RadCloud, a novel real time framework for directly obtaining higher-resolution lidar-like 2D point clouds from low-resolution radar frames on resource-constrained platforms commonly used in unmanned aerial and ground vehicles (UAVs and UGVs, respectively); such point clouds can then be used for accurate environmental mapping, navigating unknown environments, and other robotics tasks. While high-resolution sensing using radar data has been previously reported, existing methods cannot be used on most UAVs, which have limited computational power and energy; thus, existing demonstrations focus on offline radar processing. RadCloud overcomes these challenges by using a radar configuration with 1/4th of the range resolution and employing a deep learning model with 2.25x fewer parameters. Additionally, RadCloud utilizes a novel chirp-based approach that makes obtained point clouds resilient to rapid movements (e.g., aggressive turns or spins), which commonly occur during UAV flights. In real-world experiments, we demonstrate the accuracy and applicability of RadCloud on commercially available UAVs and UGVs, with off-the-shelf radar platforms on-board.
A Multi-Agent Security Testbed for the Analysis of Attacks and Defenses in Collaborative Sensor Fusion
Jan 17, 2024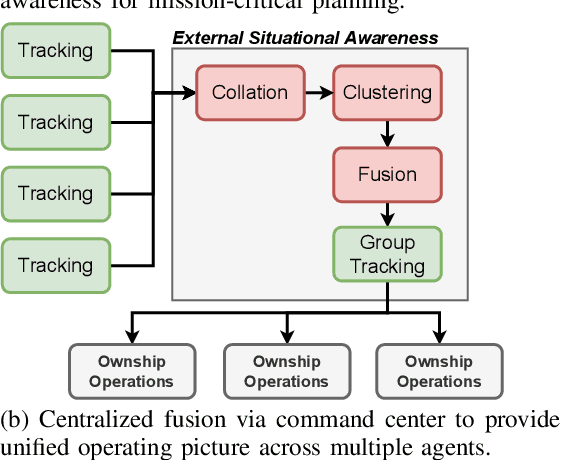
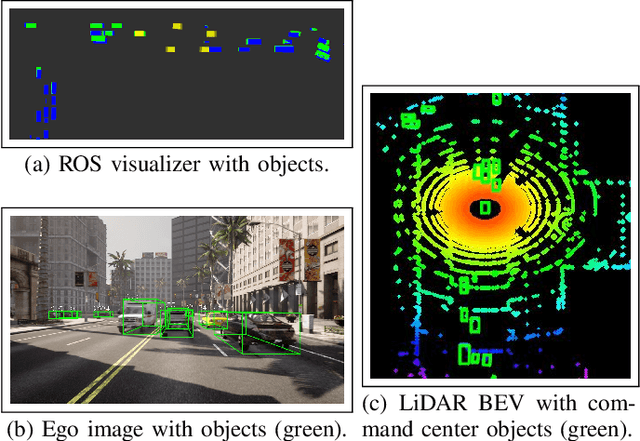
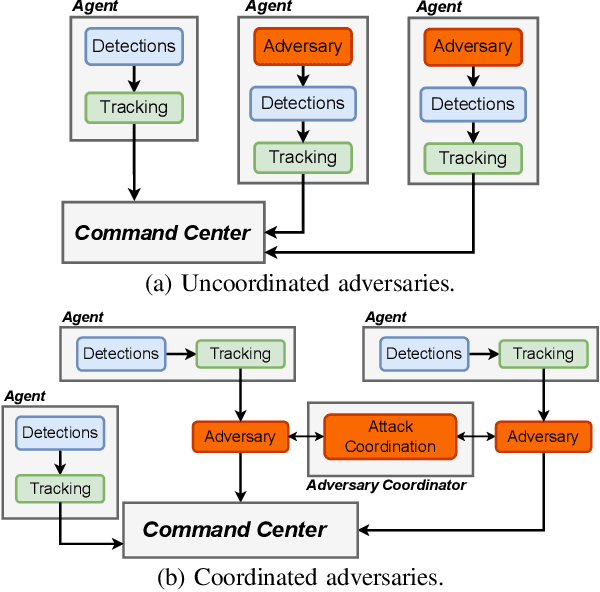
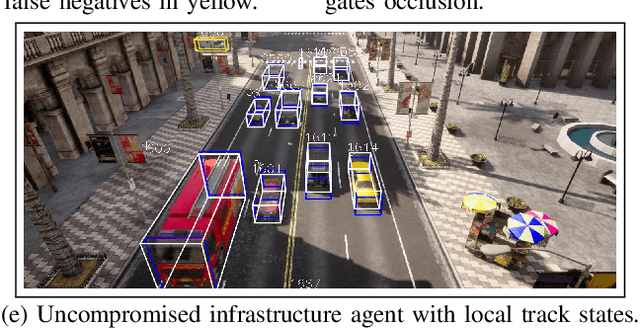
The performance and safety of autonomous vehicles (AVs) deteriorates under adverse environments and adversarial actors. The investment in multi-sensor, multi-agent (MSMA) AVs is meant to promote improved efficiency of travel and mitigate safety risks. Unfortunately, minimal investment has been made to develop security-aware MSMA sensor fusion pipelines leaving them vulnerable to adversaries. To advance security analysis of AVs, we develop the Multi-Agent Security Testbed, MAST, in the Robot Operating System (ROS2). Our framework is scalable for general AV scenarios and is integrated with recent multi-agent datasets. We construct the first bridge between AVstack and ROS and develop automated AV pipeline builds to enable rapid AV prototyping. We tackle the challenge of deploying variable numbers of agent/adversary nodes at launch-time with dynamic topic remapping. Using this testbed, we motivate the need for security-aware AV architectures by exposing the vulnerability of centralized multi-agent fusion pipelines to (un)coordinated adversary models in case studies and Monte Carlo analysis.
MadRadar: A Black-Box Physical Layer Attack Framework on mmWave Automotive FMCW Radars
Nov 27, 2023



Frequency modulated continuous wave (FMCW) millimeter-wave (mmWave) radars play a critical role in many of the advanced driver assistance systems (ADAS) featured on today's vehicles. While previous works have demonstrated (only) successful false-positive spoofing attacks against these sensors, all but one assumed that an attacker had the runtime knowledge of the victim radar's configuration. In this work, we introduce MadRadar, a general black-box radar attack framework for automotive mmWave FMCW radars capable of estimating the victim radar's configuration in real-time, and then executing an attack based on the estimates. We evaluate the impact of such attacks maliciously manipulating a victim radar's point cloud, and show the novel ability to effectively `add' (i.e., false positive attacks), `remove' (i.e., false negative attacks), or `move' (i.e., translation attacks) object detections from a victim vehicle's scene. Finally, we experimentally demonstrate the feasibility of our attacks on real-world case studies performed using a real-time physical prototype on a software-defined radio platform.
A Modular Platform For Collaborative, Distributed Sensor Fusion
Mar 29, 2023Leading autonomous vehicle (AV) platforms and testing infrastructures are, unfortunately, proprietary and closed-source. Thus, it is difficult to evaluate how well safety-critical AVs perform and how safe they truly are. Similarly, few platforms exist for much-needed multi-agent analysis. To provide a starting point for analysis of sensor fusion and collaborative & distributed sensing, we design an accessible, modular sensing platform with AVstack. We build collaborative and distributed camera-radar fusion algorithms and demonstrate an evaluation ecosystem of AV datasets, physics-based simulators, and hardware in the physical world. This three-part ecosystem enables testing next-generation configurations that are prohibitively challenging in existing development platforms.