 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARS: Defending Unmanned Aerial Vehicles From Attacks on Inertial Sensors with Model-based Anomaly Detection and Recovery
May 02, 2025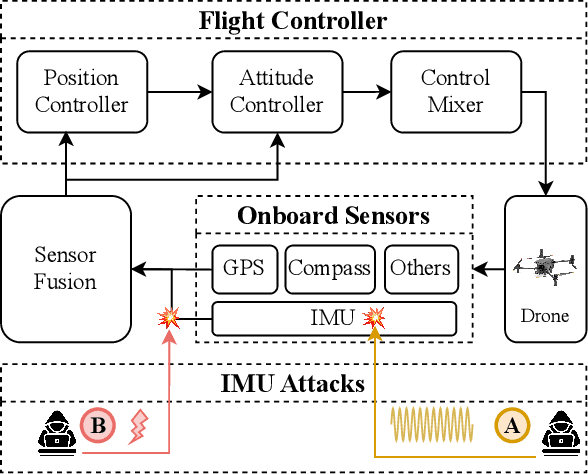
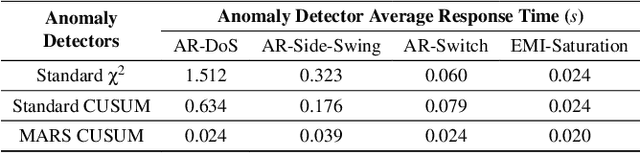
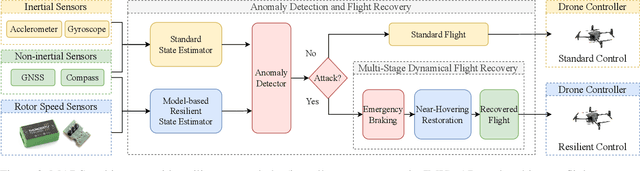
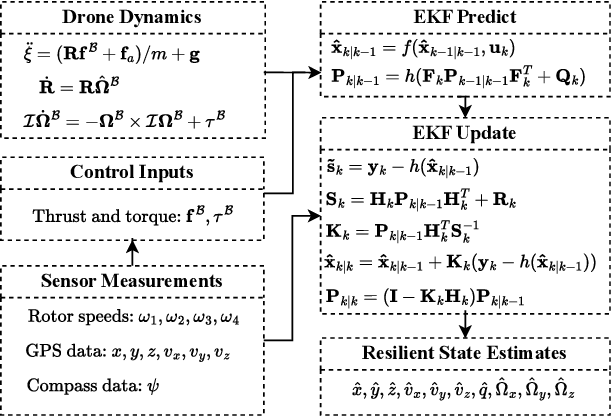
Unmanned Aerial Vehicles (UAVs) rely on measurements from Inertial Measurement Units (IMUs) to maintain stable flight. However, IMUs are susceptible to physical attacks, including acoustic resonant and electromagnetic interference attacks, resulting in immediate UAV crashes. Consequently, we introduce a Model-based Anomaly detection and Recovery System (MARS) that enables UAVs to quickly detect adversarial attacks on inertial sensors and achieve dynamic flight recovery. MARS features an attack-resilient state estimator based on the Extended Kalman Filter, which incorporates position, velocity, heading, and rotor speed measurements to reconstruct accurate attitude and angular velocity information for UAV control. Moreover, a statistical anomaly detection system monitors IMU sensor data, raising a system-level alert if an attack is detected. Upon receiving the alert, a multi-stage dynamic flight recovery strategy suspends the ongoing mission, stabilizes the drone in a hovering condition, and then resumes tasks under the resilient control. Experimental results in PX4 software-in-the-loop environments as well as real-world MARS-PX4 autopilot-equipped drones demonstrate the superiority of our approach over existing IMU-defense frameworks, showcasing the ability of the UAVs to survive attacks and complete the missions.
RadCloud: Real-Time High-Resolution Point Cloud Generation Using Low-Cost Radars for Aerial and Ground Vehicles
Mar 09, 2024



In this work, we present RadCloud, a novel real time framework for directly obtaining higher-resolution lidar-like 2D point clouds from low-resolution radar frames on resource-constrained platforms commonly used in unmanned aerial and ground vehicles (UAVs and UGVs, respectively); such point clouds can then be used for accurate environmental mapping, navigating unknown environments, and other robotics tasks. While high-resolution sensing using radar data has been previously reported, existing methods cannot be used on most UAVs, which have limited computational power and energy; thus, existing demonstrations focus on offline radar processing. RadCloud overcomes these challenges by using a radar configuration with 1/4th of the range resolution and employing a deep learning model with 2.25x fewer parameters. Additionally, RadCloud utilizes a novel chirp-based approach that makes obtained point clouds resilient to rapid movements (e.g., aggressive turns or spins), which commonly occur during UAV flights. In real-world experiments, we demonstrate the accuracy and applicability of RadCloud on commercially available UAVs and UGVs, with off-the-shelf radar platforms on-board.
From Spectral Theorem to Statistical Independence with Application to System Identification
Oct 16, 2023High dimensional random dynamical systems are ubiquitous, including -- but not limited to -- cyber-physical systems, daily return on different stocks of S&P 1500 and velocity profile of interacting particle systems around McKeanVlasov limit. Mathematically, underlying phenomenon can be captured via a stable $n$-dimensional linear transformation `$A$' and additive randomness. System identification aims at extracting useful information about underlying dynamical system, given a length $N$ trajectory from it (corresponds to an $n \times N$ dimensional data matrix). We use spectral theorem for non-Hermitian operators to show that spatio-temperal correlations are dictated by the discrepancy between algebraic and geometric multiplicity of distinct eigenvalues corresponding to state transition matrix. Small discrepancies imply that original trajectory essentially comprises of multiple lower dimensional random dynamical systems living on $A$ invariant subspaces and are statistically independent of each other. In the process, we provide first quantitative handle on decay rate of finite powers of state transition matrix $\|A^{k}\|$ . It is shown that when a stable dynamical system has only one distinct eigenvalue and discrepancy of $n-1$: $\|A\|$ has a dependence on $n$, resulting dynamics are spatially inseparable and consequently there exist at least one row with covariates of typical size $\Theta\big(\sqrt{N-n+1}$ $e^{n}\big)$ i.e., even under stability assumption, covariates can suffer from curse of dimensionality. In the light of these findings we set the stage for non-asymptotic error analysis in estimation of state transition matrix $A$ via least squares regression on observed trajectory by showing that element-wise error is essentially a variant of well-know Littlewood-Offord problem.
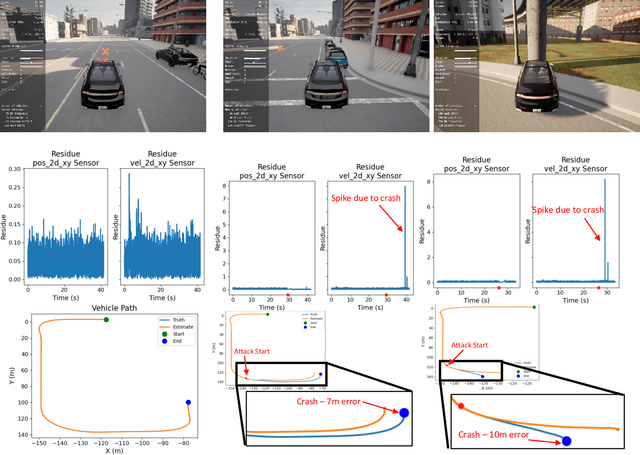
Stealthy Perception-based Attacks on Unmanned Aerial Vehicles
Mar 03, 2023In this work, we study vulnerability of unmanned aerial vehicles (UAVs) to stealthy attacks on perception-based control. To guide our analysis, we consider two specific missions: ($i$) ground vehicle tracking (GVT), and ($ii$) vertical take-off and landing (VTOL) of a quadcopter on a moving ground vehicle. Specifically, we introduce a method to consistently attack both the sensors measurements and camera images over time, in order to cause control performance degradation (e.g., by failing the mission) while remaining stealthy (i.e., undetected by the deployed anomaly detector). Unlike existing attacks that mainly rely on vulnerability of deep neural networks to small input perturbations (e.g., by adding small patches and/or noise to the images), we show that stealthy yet effective attacks can be designed by changing images of the ground vehicle's landing markers as well as suitably falsifying sensing data. We illustrate the effectiveness of our attacks in Gazebo 3D robotics simulator.
Learning-Based Vulnerability Analysis of Cyber-Physical Systems
Mar 10, 2021

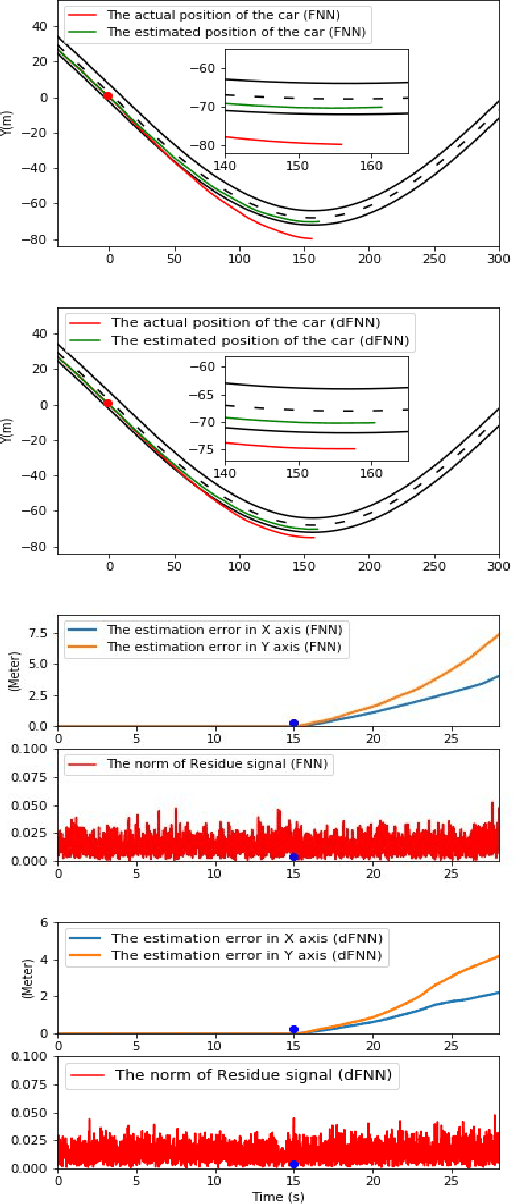
This work focuses on the use of deep learning for vulnerability analysis of cyber-physical systems (CPS). Specifically, we consider a control architecture widely used in CPS (e.g., robotics), where the low-level control is based on e.g., the extended Kalman filter (EKF) and an anomaly detector. To facilitate analyzing the impact potential sensing attacks could have, our objective is to develop learning-enabled attack generators capable of designing stealthy attacks that maximally degrade system operation. We show how such problem can be cast within a learning-based grey-box framework where parts of the runtime information are known to the attacker, and introduce two models based on feed-forward neural networks (FNN); both models are trained offline, using a cost function that combines the attack effects on the estimation error and the residual signal used for anomaly detection, so that the trained models are capable of recursively generating such effective sensor attacks in real-time. The effectiveness of the proposed methods is illustrated on several case studies.