 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaGNNarok: A Light-Weight Graph Neural Network for Enhancing Radar Point Clouds on Unmanned Ground Vehicles
Jul 01, 2025Low-cost indoor mobile robots have gained popularity with the increasing adoption of automation in homes and commercial spaces. However, existing lidar and camera-based solutions have limitations such as poor performance in visually obscured environments, high computational overhead for data processing, and high costs for lidars. In contrast, mmWave radar sensors offer a cost-effective and lightweight alternative, providing accurate ranging regardless of visibility. However, existing radar-based localization suffers from sparse point cloud generation, noise, and false detections. Thus, in this work, we introduce RaGNNarok, a real-time, lightweight, and generalizable graph neural network (GNN)-based framework to enhance radar point clouds, even in complex and dynamic environments. With an inference time of just 7.3 ms on the low-cost Raspberry Pi 5, RaGNNarok runs efficiently even on such resource-constrained devices, requiring no additional computational resources. We evaluate its performance across key tasks, including localization, SLAM, and autonomous navigation, in three different environments. Our results demonstrate strong reliability and generalizability, making RaGNNarok a robust solution for low-cost indoor mobile robots.
MARS: Defending Unmanned Aerial Vehicles From Attacks on Inertial Sensors with Model-based Anomaly Detection and Recovery
May 02, 2025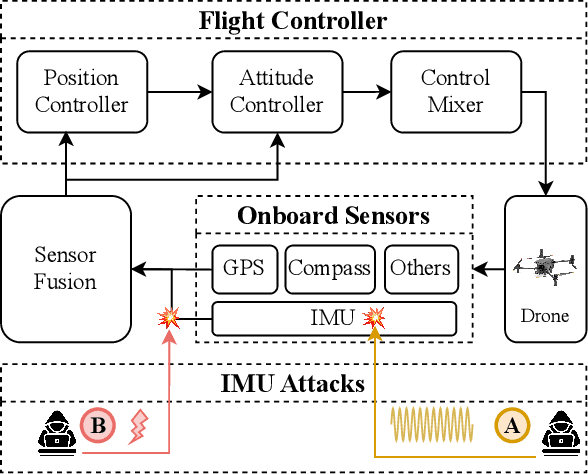
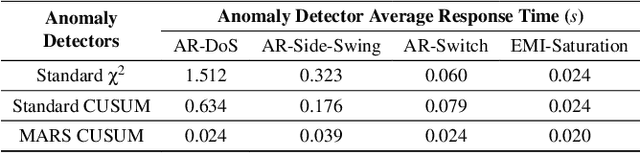
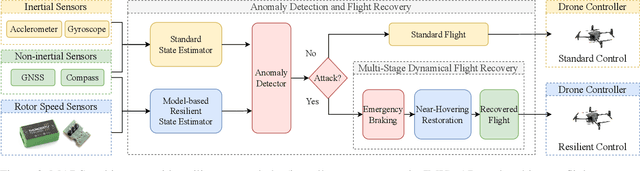
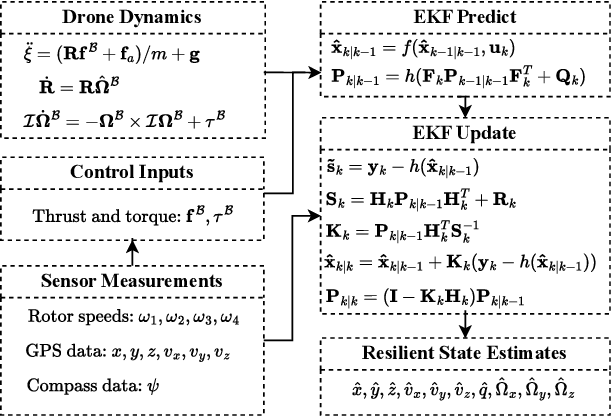
Unmanned Aerial Vehicles (UAVs) rely on measurements from Inertial Measurement Units (IMUs) to maintain stable flight. However, IMUs are susceptible to physical attacks, including acoustic resonant and electromagnetic interference attacks, resulting in immediate UAV crashes. Consequently, we introduce a Model-based Anomaly detection and Recovery System (MARS) that enables UAVs to quickly detect adversarial attacks on inertial sensors and achieve dynamic flight recovery. MARS features an attack-resilient state estimator based on the Extended Kalman Filter, which incorporates position, velocity, heading, and rotor speed measurements to reconstruct accurate attitude and angular velocity information for UAV control. Moreover, a statistical anomaly detection system monitors IMU sensor data, raising a system-level alert if an attack is detected. Upon receiving the alert, a multi-stage dynamic flight recovery strategy suspends the ongoing mission, stabilizes the drone in a hovering condition, and then resumes tasks under the resilient control. Experimental results in PX4 software-in-the-loop environments as well as real-world MARS-PX4 autopilot-equipped drones demonstrate the superiority of our approach over existing IMU-defense frameworks, showcasing the ability of the UAVs to survive attacks and complete the missions.
RadCloud: Real-Time High-Resolution Point Cloud Generation Using Low-Cost Radars for Aerial and Ground Vehicles
Mar 09, 2024



In this work, we present RadCloud, a novel real time framework for directly obtaining higher-resolution lidar-like 2D point clouds from low-resolution radar frames on resource-constrained platforms commonly used in unmanned aerial and ground vehicles (UAVs and UGVs, respectively); such point clouds can then be used for accurate environmental mapping, navigating unknown environments, and other robotics tasks. While high-resolution sensing using radar data has been previously reported, existing methods cannot be used on most UAVs, which have limited computational power and energy; thus, existing demonstrations focus on offline radar processing. RadCloud overcomes these challenges by using a radar configuration with 1/4th of the range resolution and employing a deep learning model with 2.25x fewer parameters. Additionally, RadCloud utilizes a novel chirp-based approach that makes obtained point clouds resilient to rapid movements (e.g., aggressive turns or spins), which commonly occur during UAV flights. In real-world experiments, we demonstrate the accuracy and applicability of RadCloud on commercially available UAVs and UGVs, with off-the-shelf radar platforms on-board.
A Multi-Agent Security Testbed for the Analysis of Attacks and Defenses in Collaborative Sensor Fusion
Jan 17, 2024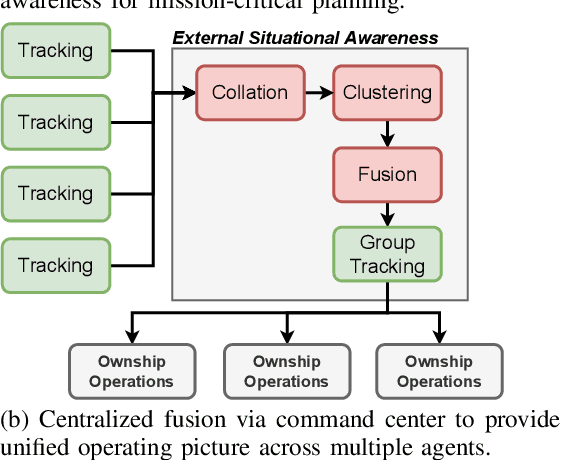
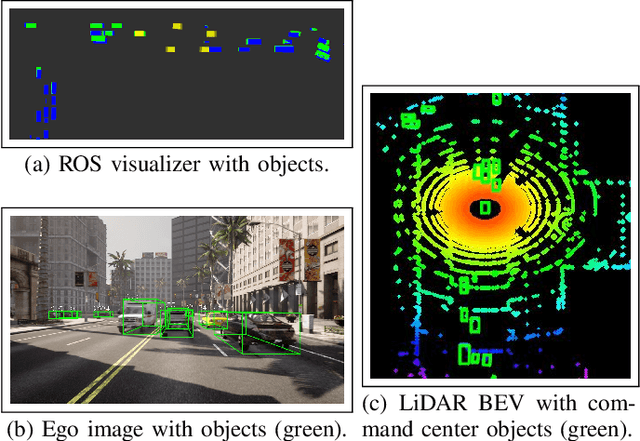
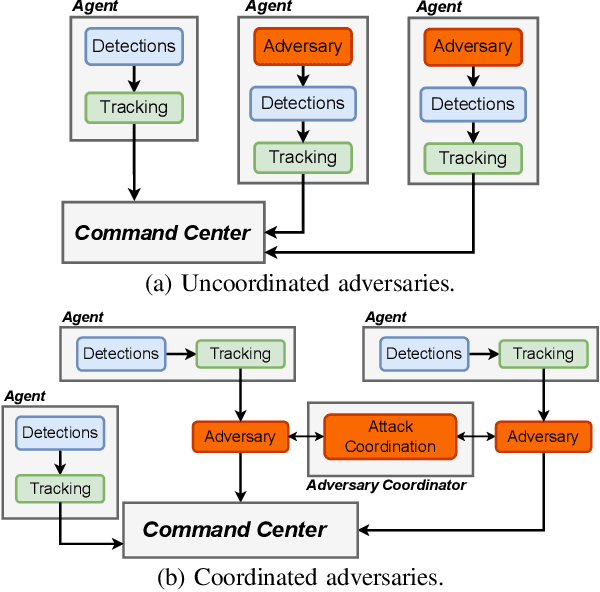
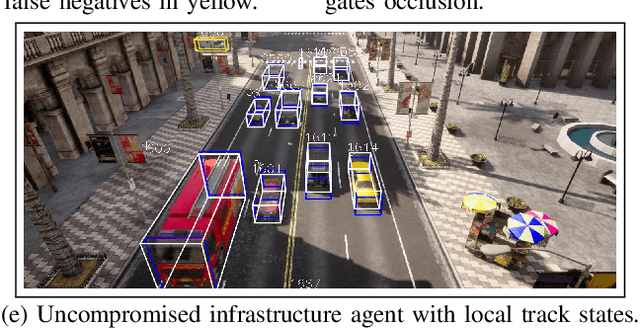
The performance and safety of autonomous vehicles (AVs) deteriorates under adverse environments and adversarial actors. The investment in multi-sensor, multi-agent (MSMA) AVs is meant to promote improved efficiency of travel and mitigate safety risks. Unfortunately, minimal investment has been made to develop security-aware MSMA sensor fusion pipelines leaving them vulnerable to adversaries. To advance security analysis of AVs, we develop the Multi-Agent Security Testbed, MAST, in the Robot Operating System (ROS2). Our framework is scalable for general AV scenarios and is integrated with recent multi-agent datasets. We construct the first bridge between AVstack and ROS and develop automated AV pipeline builds to enable rapid AV prototyping. We tackle the challenge of deploying variable numbers of agent/adversary nodes at launch-time with dynamic topic remapping. Using this testbed, we motivate the need for security-aware AV architectures by exposing the vulnerability of centralized multi-agent fusion pipelines to (un)coordinated adversary models in case studies and Monte Carlo analysis.
Asymptotic Boundary Shrink Control with Multi-robot Systems
Jun 22, 2020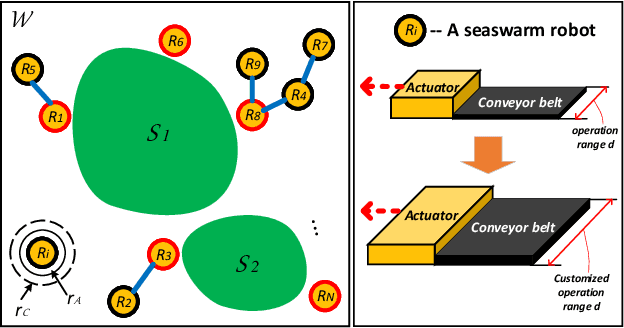
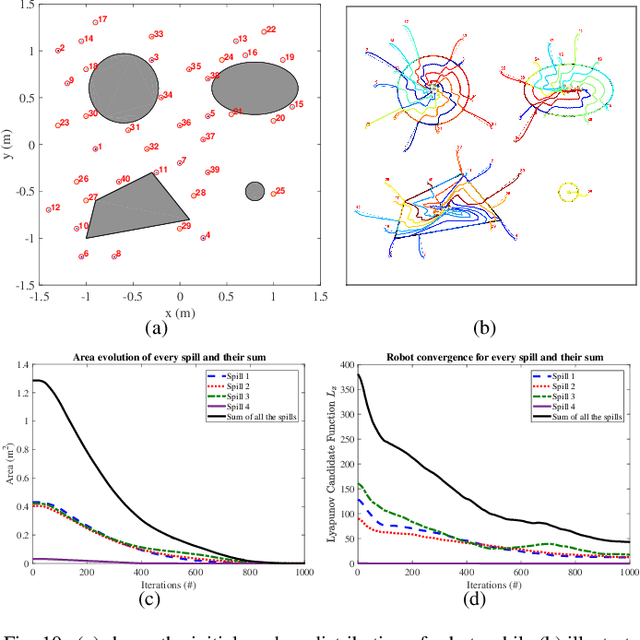
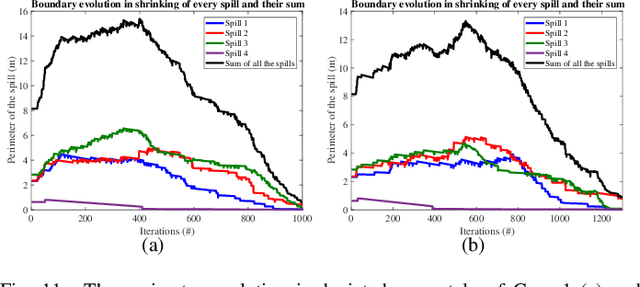
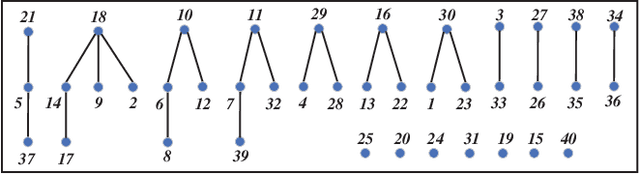
Harmful marine spills, such as algae blooms and oil spills, damage ecosystems and threaten public health tremendously. Hence, an effective spill coverage and removal strategy will play a significant role in environmental protection. In recent years, low-cost water surface robots have emerged as a solution, with their efficacy verified at small scale. However, practical limitations such as connectivity, scalability, and sensing and operation ranges significantly impair their large-scale use. To circumvent these limitations, we propose a novel asymptotic boundary shrink control strategy that enables collective coverage of a spill by autonomous robots featuring customized operation ranges. For each robot, a novel controller is implemented that relies only on local vision sensors with limited vision range. Moreover, the distributedness of this strategy allows any number of robots to be employed without inter-robot collisions. Finally, features of this approach including the convergence of robot motion during boundary shrink control, spill clearance rate, and the capability to work under limited ranges of vision and wireless connectivity are validated through extensive experiments with simulation.