 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsymptotic Boundary Shrink Control with Multi-robot Systems
Jun 22, 2020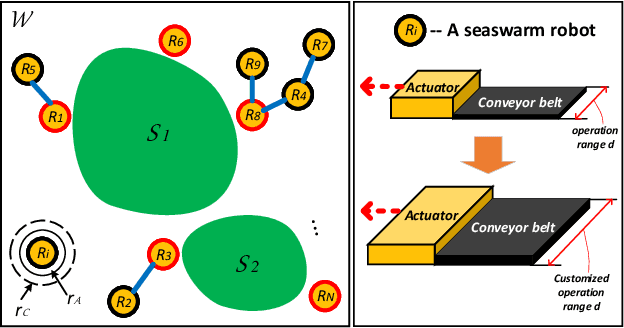
Harmful marine spills, such as algae blooms and oil spills, damage ecosystems and threaten public health tremendously. Hence, an effective spill coverage and removal strategy will play a significant role in environmental protection. In recent years, low-cost water surface robots have emerged as a solution, with their efficacy verified at small scale. However, practical limitations such as connectivity, scalability, and sensing and operation ranges significantly impair their large-scale use. To circumvent these limitations, we propose a novel asymptotic boundary shrink control strategy that enables collective coverage of a spill by autonomous robots featuring customized operation ranges. For each robot, a novel controller is implemented that relies only on local vision sensors with limited vision range. Moreover, the distributedness of this strategy allows any number of robots to be employed without inter-robot collisions. Finally, features of this approach including the convergence of robot motion during boundary shrink control, spill clearance rate, and the capability to work under limited ranges of vision and wireless connectivity are validated through extensive experiments with simulation.