 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLaViDA: A Large Language Vision Driving Assistant for Explicit Reasoning and Enhanced Trajectory Planning
Dec 20, 2025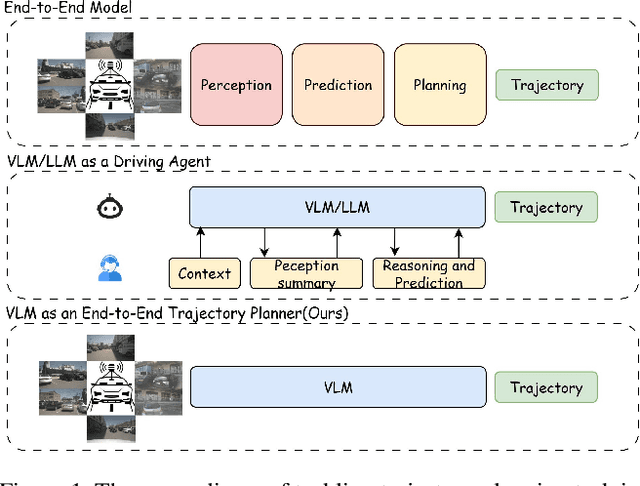
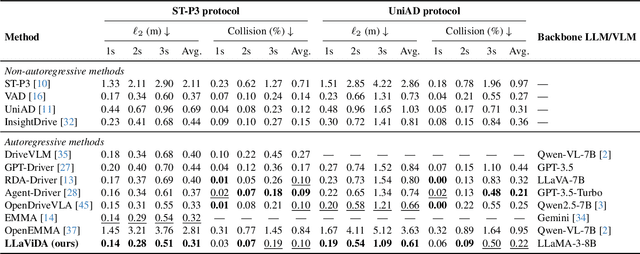
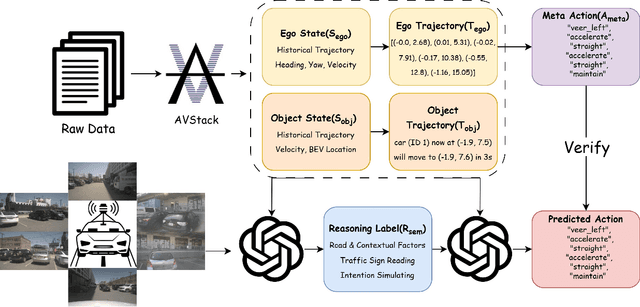
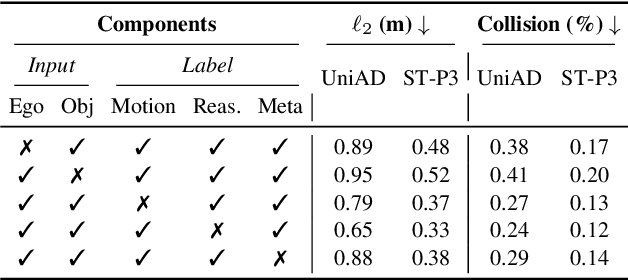
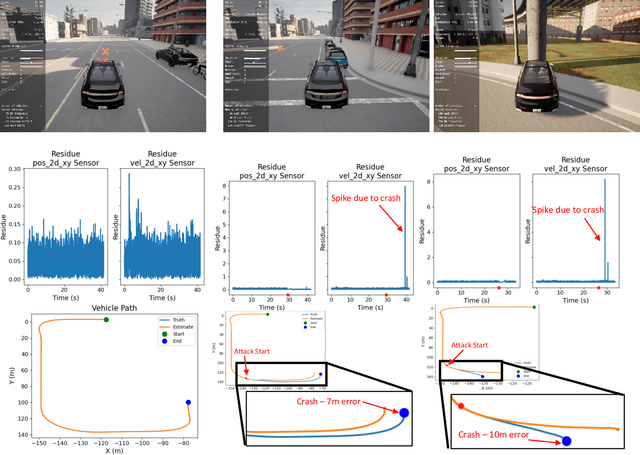
Trajectory planning is a fundamental yet challenging component of autonomous driving. End-to-end planners frequently falter under adverse weather, unpredictable human behavior, or complex road layouts, primarily because they lack strong generalization or few-shot capabilities beyond their training data. We propose LLaViDA, a Large Language Vision Driving Assistant that leverages a Vision-Language Model (VLM) for object motion prediction, semantic grounding, and chain-of-thought reasoning for trajectory planning in autonomous driving. A two-stage training pipeline--supervised fine-tuning followed by Trajectory Preference Optimization (TPO)--enhances scene understanding and trajectory planning by injecting regression-based supervision, produces a powerful "VLM Trajectory Planner for Autonomous Driving." On the NuScenes benchmark, LLaViDA surpasses state-of-the-art end-to-end and other recent VLM/LLM-based baselines in open-loop trajectory planning task, achieving an average L2 trajectory error of 0.31 m and a collision rate of 0.10% on the NuScenes test set. The code for this paper is available at GitHub.
RaGNNarok: A Light-Weight Graph Neural Network for Enhancing Radar Point Clouds on Unmanned Ground Vehicles
Jul 01, 2025Low-cost indoor mobile robots have gained popularity with the increasing adoption of automation in homes and commercial spaces. However, existing lidar and camera-based solutions have limitations such as poor performance in visually obscured environments, high computational overhead for data processing, and high costs for lidars. In contrast, mmWave radar sensors offer a cost-effective and lightweight alternative, providing accurate ranging regardless of visibility. However, existing radar-based localization suffers from sparse point cloud generation, noise, and false detections. Thus, in this work, we introduce RaGNNarok, a real-time, lightweight, and generalizable graph neural network (GNN)-based framework to enhance radar point clouds, even in complex and dynamic environments. With an inference time of just 7.3 ms on the low-cost Raspberry Pi 5, RaGNNarok runs efficiently even on such resource-constrained devices, requiring no additional computational resources. We evaluate its performance across key tasks, including localization, SLAM, and autonomous navigation, in three different environments. Our results demonstrate strong reliability and generalizability, making RaGNNarok a robust solution for low-cost indoor mobile robots.
RadCloud: Real-Time High-Resolution Point Cloud Generation Using Low-Cost Radars for Aerial and Ground Vehicles
Mar 09, 2024



In this work, we present RadCloud, a novel real time framework for directly obtaining higher-resolution lidar-like 2D point clouds from low-resolution radar frames on resource-constrained platforms commonly used in unmanned aerial and ground vehicles (UAVs and UGVs, respectively); such point clouds can then be used for accurate environmental mapping, navigating unknown environments, and other robotics tasks. While high-resolution sensing using radar data has been previously reported, existing methods cannot be used on most UAVs, which have limited computational power and energy; thus, existing demonstrations focus on offline radar processing. RadCloud overcomes these challenges by using a radar configuration with 1/4th of the range resolution and employing a deep learning model with 2.25x fewer parameters. Additionally, RadCloud utilizes a novel chirp-based approach that makes obtained point clouds resilient to rapid movements (e.g., aggressive turns or spins), which commonly occur during UAV flights. In real-world experiments, we demonstrate the accuracy and applicability of RadCloud on commercially available UAVs and UGVs, with off-the-shelf radar platforms on-board.
Learning-Based Vulnerability Analysis of Cyber-Physical Systems
Mar 10, 2021

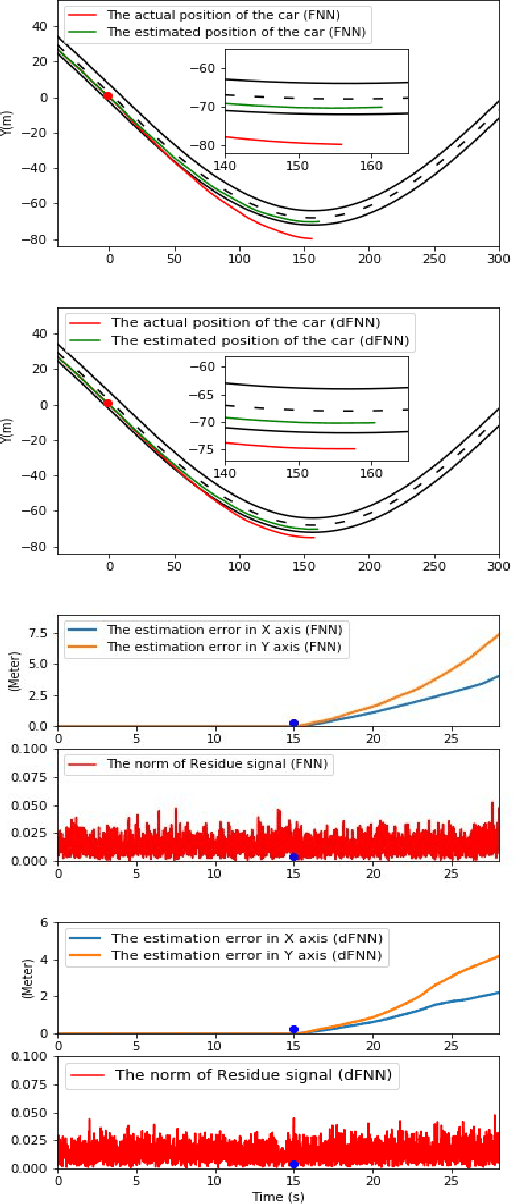
This work focuses on the use of deep learning for vulnerability analysis of cyber-physical systems (CPS). Specifically, we consider a control architecture widely used in CPS (e.g., robotics), where the low-level control is based on e.g., the extended Kalman filter (EKF) and an anomaly detector. To facilitate analyzing the impact potential sensing attacks could have, our objective is to develop learning-enabled attack generators capable of designing stealthy attacks that maximally degrade system operation. We show how such problem can be cast within a learning-based grey-box framework where parts of the runtime information are known to the attacker, and introduce two models based on feed-forward neural networks (FNN); both models are trained offline, using a cost function that combines the attack effects on the estimation error and the residual signal used for anomaly detection, so that the trained models are capable of recursively generating such effective sensor attacks in real-time. The effectiveness of the proposed methods is illustrated on several case studies.
Segmentation of the Proximal Femur from MR Images using Deep Convolutional Neural Networks
Mar 20, 2018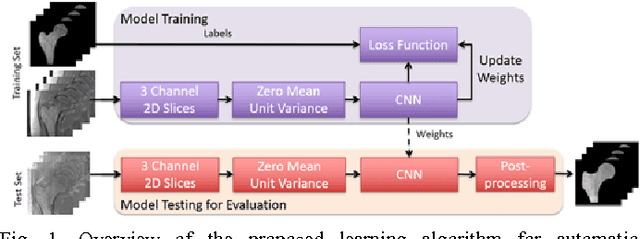
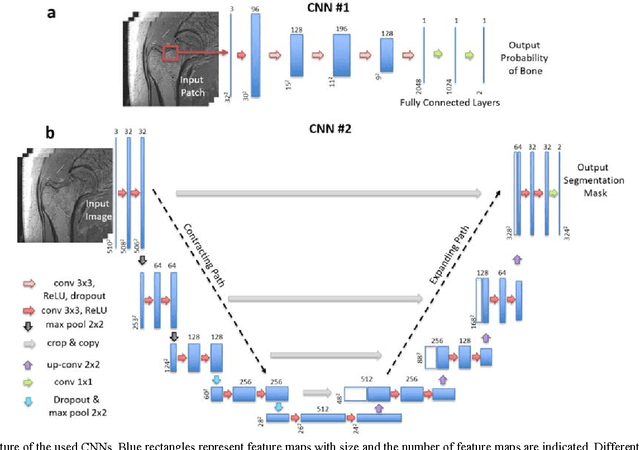
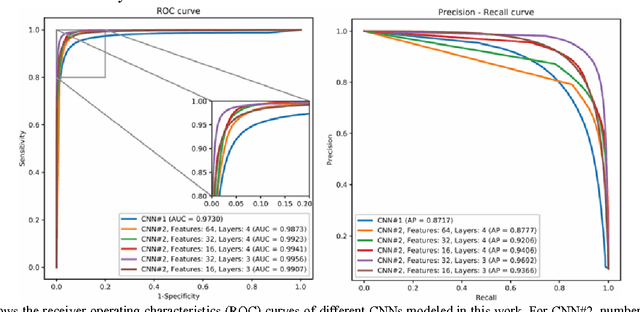
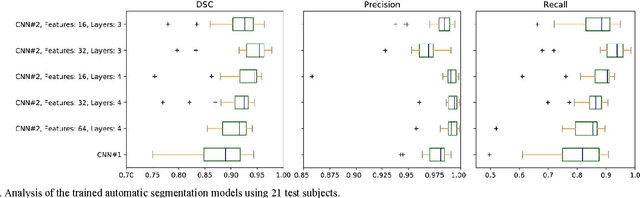
Magnetic resonance imaging (MRI) has been proposed as a complimentary method to measure bone quality and assess fracture risk. However, manual segmentation of MR images of bone is time-consuming, limiting the use of MRI measurements in the clinical practice. The purpose of this paper is to present an automatic proximal femur segmentation method that is based on deep convolutional neural networks (CNNs). This study had institutional review board approval and written informed consent was obtained from all subjects. A dataset of volumetric structural MR images of the proximal femur from 86 subject were manually-segmented by an expert. We performed experiments by training two different CNN architectures with multiple number of initial feature maps and layers, and tested their segmentation performance against the gold standard of manual segmentations using four-fold cross-validation. Automatic segmentation of the proximal femur achieved a high dice similarity score of 0.94$\pm$0.05 with precision = 0.95$\pm$0.02, and recall = 0.94$\pm$0.08 using a CNN architecture based on 3D convolution exceeding the performance of 2D CNNs. The high segmentation accuracy provided by CNNs has the potential to help bring the use of structural MRI measurements of bone quality into clinical practice for management of osteoporosis.