 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft Fabric-Based Thermal Haptic Device for VR and Teleoperation
Aug 28, 2025This paper presents a novel fabric-based thermal-haptic interface for virtual reality and teleoperation. It integrates pneumatic actuation and conductive fabric with an innovative ultra-lightweight design, achieving only 2~g for each finger unit. By embedding heating elements within textile pneumatic chambers, the system delivers modulated pressure and thermal stimuli to fingerpads through a fully soft, wearable interface. Comprehensive characterization demonstrates rapid thermal modulation with heating rates up to 3$^{\circ}$C/s, enabling dynamic thermal feedback for virtual or teleoperation interactions. The pneumatic subsystem generates forces up to 8.93~N at 50~kPa, while optimization of fingerpad-actuator clearance enhances cooling efficiency with minimal force reduction. Experimental validation conducted with two different user studies shows high temperature identification accuracy (0.98 overall) across three thermal levels, and significant manipulation improvements in a virtual pick-and-place tasks. Results show enhanced success rates (88.5\% to 96.4\%, p = 0.029) and improved force control precision (p = 0.013) when haptic feedback is enabled, validating the effectiveness of the integrated thermal-haptic approach for advanced human-machine interaction applications.
Colab NAS: Obtaining lightweight task-specific convolutional neural networks following Occam's razor
Dec 15, 2022



The current trend of applying transfer learning from CNNs trained on large datasets can be an overkill when the target application is a custom and delimited problem with enough data to train a network from scratch. On the other hand, the training of custom and lighter CNNs requires expertise, in the from-scratch case, and or high-end resources, as in the case of hardware-aware neural architecture search (HW NAS), limiting access to the technology by non-habitual NN developers. For this reason, we present Colab NAS, an affordable HW NAS technique for producing lightweight task-specific CNNs. Its novel derivative-free search strategy, inspired by Occam's razor, allows it to obtain state-of-the-art results on the Visual Wake Word dataset in just 4.5 GPU hours using free online GPU services such as Google Colaboratory and Kaggle Kernel.
Flexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019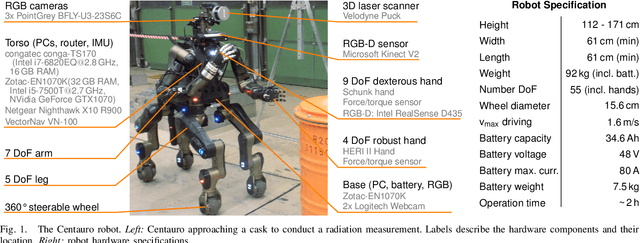
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.
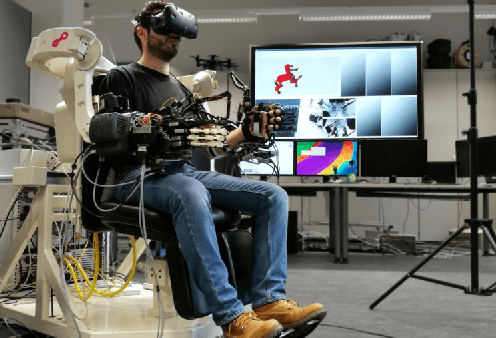
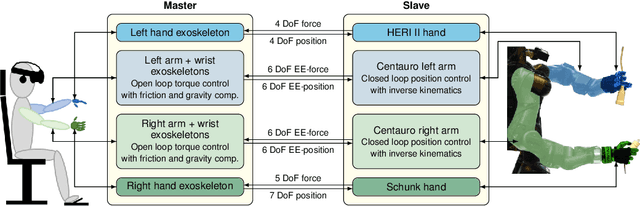
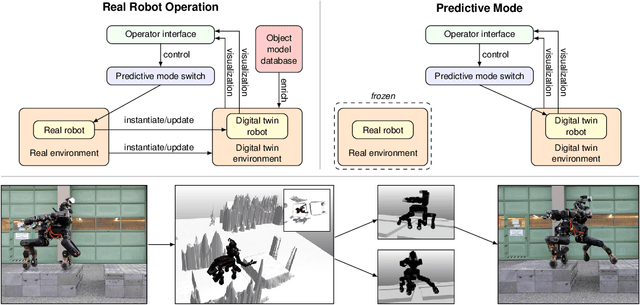
Remote Mobile Manipulation with the Centauro Robot: Full-body Telepresence and Autonomous Operator Assistance
Aug 05, 2019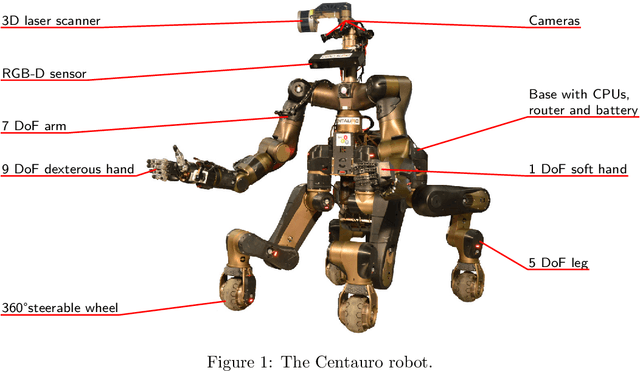
Solving mobile manipulation tasks in inaccessible and dangerous environments is an important application of robots to support humans. Example domains are construction and maintenance of manned and unmanned stations on the moon and other planets. Suitable platforms require flexible and robust hardware, a locomotion approach that allows for navigating a wide variety of terrains, dexterous manipulation capabilities, and respective user interfaces. We present the CENTAURO system which has been designed for these requirements and consists of the Centauro robot and a set of advanced operator interfaces with complementary strength enabling the system to solve a wide range of realistic mobile manipulation tasks. The robot possesses a centaur-like body plan and is driven by torque-controlled compliant actuators. Four articulated legs ending in steerable wheels allow for omnidirectional driving as well as for making steps. An anthropomorphic upper body with two arms ending in five-finger hands enables human-like manipulation. The robot perceives its environment through a suite of multimodal sensors. The resulting platform complexity goes beyond the complexity of most known systems which puts the focus on a suitable operator interface. An operator can control the robot through a telepresence suit, which allows for flexibly solving a large variety of mobile manipulation tasks. Locomotion and manipulation functionalities on different levels of autonomy support the operation. The proposed user interfaces enable solving a wide variety of tasks without previous task-specific training. The integrated system is evaluated in numerous teleoperated experiments that are described along with lessons learned.