 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFORMSpoT: A Decade of Tree-Level, Country-Scale Forest Monitoring
Dec 18, 2025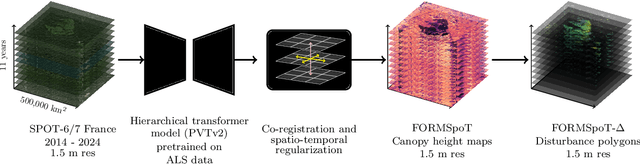
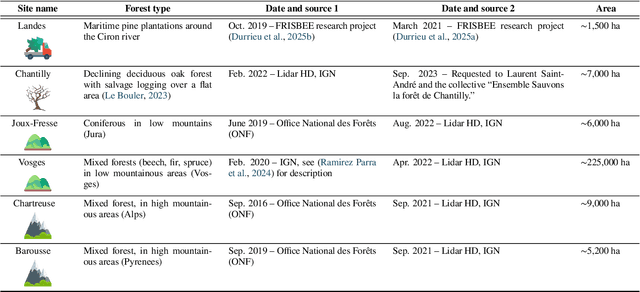
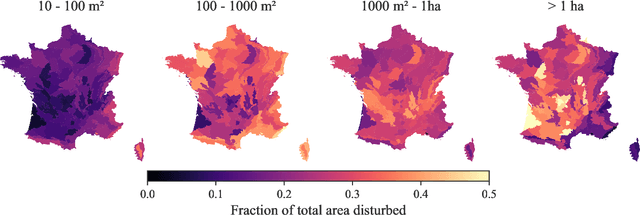
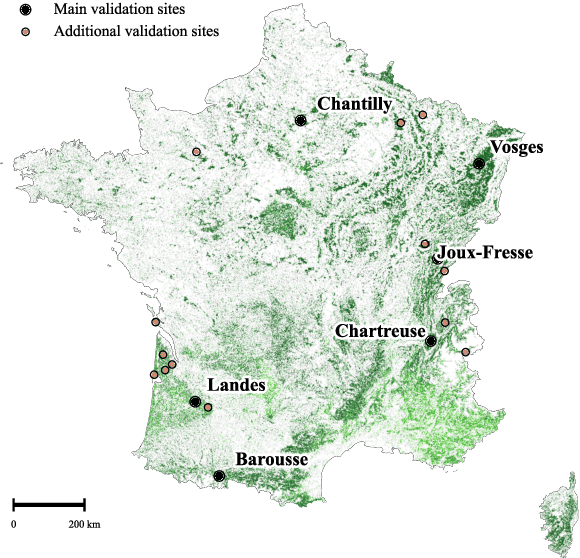
The recent decline of the European forest carbon sink highlights the need for spatially explicit and frequently updated forest monitoring tools. Yet, existing satellite-based disturbance products remain too coarse to detect changes at the scale of individual trees, typically below 100 m$^{2}$. Here, we introduce FORMSpoT (Forest Mapping with SPOT Time series), a decade-long (2014-2024) nationwide mapping of forest canopy height at 1.5 m resolution, together with annual disturbance polygons (FORMSpoT-$Δ$) covering mainland France. Canopy heights were derived from annual SPOT-6/7 composites using a hierarchical transformer model (PVTv2) trained on high-resolution airborne laser scanning (ALS) data. To enable robust change detection across heterogeneous acquisitions, we developed a dedicated post-processing pipeline combining co-registration and spatio-temporal total variation denoising. Validation against ALS revisits across 19 sites and 5,087 National Forest Inventory plots shows that FORMSpoT-$Δ$ substantially outperforms existing disturbance products. In mountainous forests, where disturbances are small and spatially fragmented, FORMSpoT-$Δ$ achieves an F1-score of 0.44, representing an order of magnitude higher than existing benchmarks. By enabling tree-level monitoring of forest dynamics at national scale, FORMSpoT-$Δ$ provides a unique tool to analyze management practices, detect early signals of forest decline, and better quantify carbon losses from subtle disturbances such as thinning or selective logging. These results underscore the critical importance of sustaining very high-resolution satellite missions like SPOT and open-data initiatives such as DINAMIS for monitoring forests under climate change.
LitePT: Lighter Yet Stronger Point Transformer
Dec 15, 2025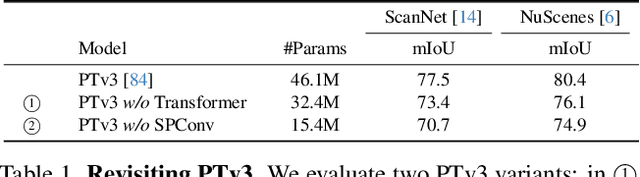
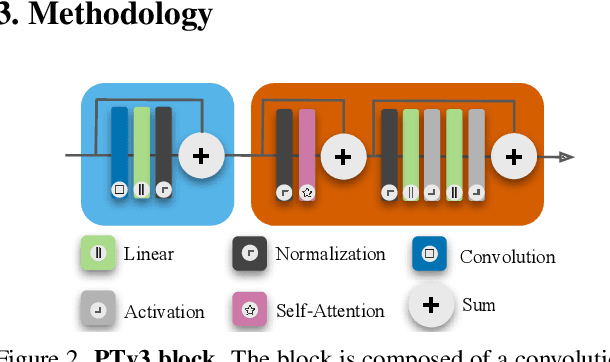
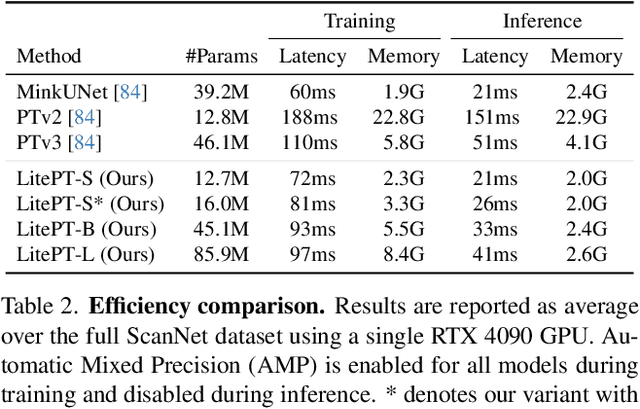
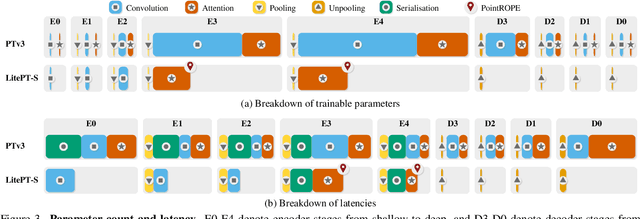
Modern neural architectures for 3D point cloud processing contain both convolutional layers and attention blocks, but the best way to assemble them remains unclear. We analyse the role of different computational blocks in 3D point cloud networks and find an intuitive behaviour: convolution is adequate to extract low-level geometry at high-resolution in early layers, where attention is expensive without bringing any benefits; attention captures high-level semantics and context in low-resolution, deep layers more efficiently. Guided by this design principle, we propose a new, improved 3D point cloud backbone that employs convolutions in early stages and switches to attention for deeper layers. To avoid the loss of spatial layout information when discarding redundant convolution layers, we introduce a novel, training-free 3D positional encoding, PointROPE. The resulting LitePT model has $3.6\times$ fewer parameters, runs $2\times$ faster, and uses $2\times$ less memory than the state-of-the-art Point Transformer V3, but nonetheless matches or even outperforms it on a range of tasks and datasets. Code and models are available at: https://github.com/prs-eth/LitePT.
SSL4Eco: A Global Seasonal Dataset for Geospatial Foundation Models in Ecology
Apr 25, 2025With the exacerbation of the biodiversity and climate crises, macroecological pursuits such as global biodiversity mapping become more urgent. Remote sensing offers a wealth of Earth observation data for ecological studies, but the scarcity of labeled datasets remains a major challenge. Recently, self-supervised learning has enabled learning representations from unlabeled data, triggering the development of pretrained geospatial models with generalizable features. However, these models are often trained on datasets biased toward areas of high human activity, leaving entire ecological regions underrepresented. Additionally, while some datasets attempt to address seasonality through multi-date imagery, they typically follow calendar seasons rather than local phenological cycles. To better capture vegetation seasonality at a global scale, we propose a simple phenology-informed sampling strategy and introduce corresponding SSL4Eco, a multi-date Sentinel-2 dataset, on which we train an existing model with a season-contrastive objective. We compare representations learned from SSL4Eco against other datasets on diverse ecological downstream tasks and demonstrate that our straightforward sampling method consistently improves representation quality, highlighting the importance of dataset construction. The model pretrained on SSL4Eco reaches state of the art performance on 7 out of 8 downstream tasks spanning (multi-label) classification and regression. We release our code, data, and model weights to support macroecological and computer vision research at https://github.com/PlekhanovaElena/ssl4eco.
Climplicit: Climatic Implicit Embeddings for Global Ecological Tasks
Apr 07, 2025Deep learning on climatic data holds potential for macroecological applications. However, its adoption remains limited among scientists outside the deep learning community due to storage, compute, and technical expertise barriers. To address this, we introduce Climplicit, a spatio-temporal geolocation encoder pretrained to generate implicit climatic representations anywhere on Earth. By bypassing the need to download raw climatic rasters and train feature extractors, our model uses x1000 fewer disk space and significantly reduces computational needs for downstream tasks. We evaluate our Climplicit embeddings on biomes classification, species distribution modeling, and plant trait regression. We find that linear probing our Climplicit embeddings consistently performs better or on par with training a model from scratch on downstream tasks and overall better than alternative geolocation encoding models.
GSR4B: Biomass Map Super-Resolution with Sentinel-1/2 Guidance
Apr 03, 2025

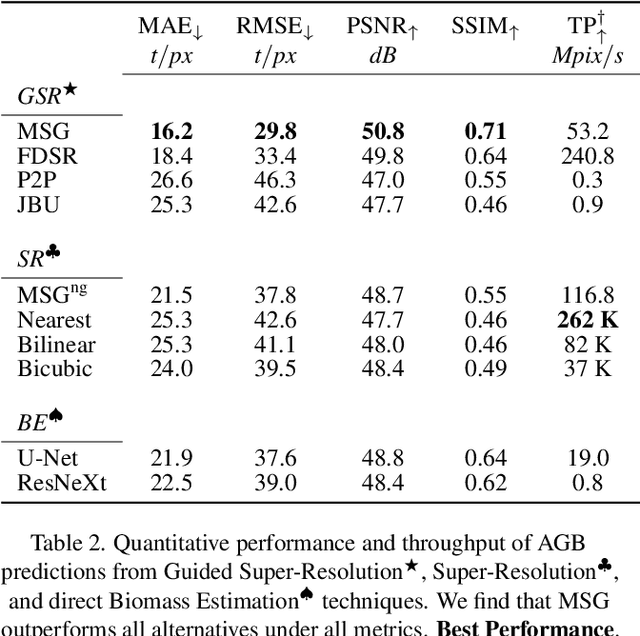

Accurate Above-Ground Biomass (AGB) mapping at both large scale and high spatio-temporal resolution is essential for applications ranging from climate modeling to biodiversity assessment, and sustainable supply chain monitoring. At present, fine-grained AGB mapping relies on costly airborne laser scanning acquisition campaigns usually limited to regional scales. Initiatives such as the ESA CCI map attempt to generate global biomass products from diverse spaceborne sensors but at a coarser resolution. To enable global, high-resolution (HR) mapping, several works propose to regress AGB from HR satellite observations such as ESA Sentinel-1/2 images. We propose a novel way to address HR AGB estimation, by leveraging both HR satellite observations and existing low-resolution (LR) biomass products. We cast this problem as Guided Super-Resolution (GSR), aiming at upsampling LR biomass maps (sources) from $100$ to $10$ m resolution, using auxiliary HR co-registered satellite images (guides). We compare super-resolving AGB maps with and without guidance, against direct regression from satellite images, on the public BioMassters dataset. We observe that Multi-Scale Guidance (MSG) outperforms direct regression both for regression ($-780$ t/ha RMSE) and perception ($+2.0$ dB PSNR) metrics, and better captures high-biomass values, without significant computational overhead. Interestingly, unlike the RGB+Depth setting they were originally designed for, our best-performing AGB GSR approaches are those that most preserve the guide image texture. Our results make a strong case for adopting the GSR framework for accurate HR biomass mapping at scale. Our code and model weights are made publicly available (https://github.com/kaankaramanofficial/GSR4B).
Lossy Neural Compression for Geospatial Analytics: A Review
Mar 03, 2025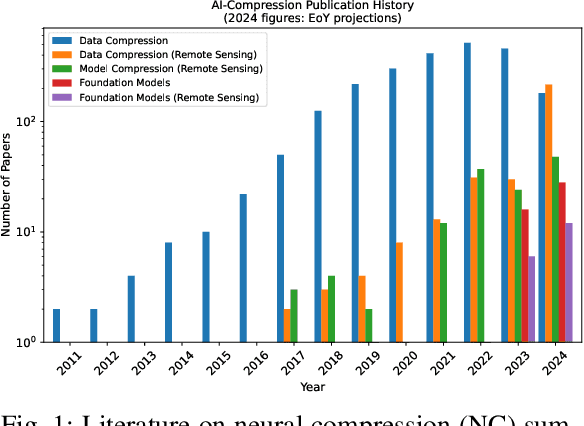
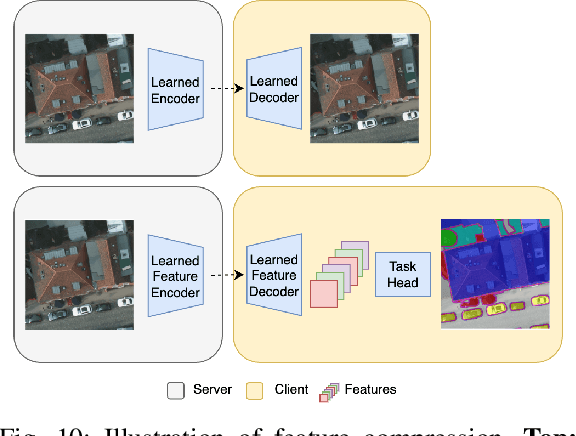
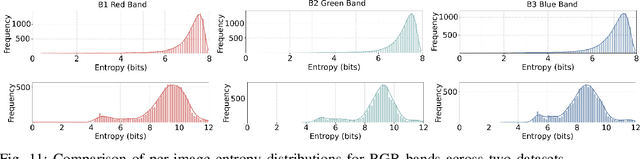
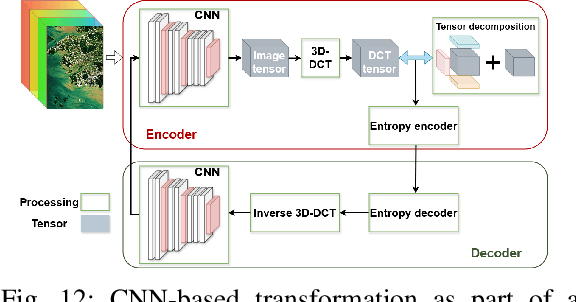
Over the past decades, there has been an explosion in the amount of available Earth Observation (EO) data. The unprecedented coverage of the Earth's surface and atmosphere by satellite imagery has resulted in large volumes of data that must be transmitted to ground stations, stored in data centers, and distributed to end users. Modern Earth System Models (ESMs) face similar challenges, operating at high spatial and temporal resolutions, producing petabytes of data per simulated day. Data compression has gained relevance over the past decade, with neural compression (NC) emerging from deep learning and information theory, making EO data and ESM outputs ideal candidates due to their abundance of unlabeled data. In this review, we outline recent developments in NC applied to geospatial data. We introduce the fundamental concepts of NC including seminal works in its traditional applications to image and video compression domains with focus on lossy compression. We discuss the unique characteristics of EO and ESM data, contrasting them with "natural images", and explain the additional challenges and opportunities they present. Moreover, we review current applications of NC across various EO modalities and explore the limited efforts in ESM compression to date. The advent of self-supervised learning (SSL) and foundation models (FM) has advanced methods to efficiently distill representations from vast unlabeled data. We connect these developments to NC for EO, highlighting the similarities between the two fields and elaborate on the potential of transferring compressed feature representations for machine--to--machine communication. Based on insights drawn from this review, we devise future directions relevant to applications in EO and ESM.
Scalable 3D Panoptic Segmentation With Superpoint Graph Clustering
Jan 12, 2024



We introduce a highly efficient method for panoptic segmentation of large 3D point clouds by redefining this task as a scalable graph clustering problem. This approach can be trained using only local auxiliary tasks, thereby eliminating the resource-intensive instance-matching step during training. Moreover, our formulation can easily be adapted to the superpoint paradigm, further increasing its efficiency. This allows our model to process scenes with millions of points and thousands of objects in a single inference. Our method, called SuperCluster, achieves a new state-of-the-art panoptic segmentation performance for two indoor scanning datasets: $50.1$ PQ ($+7.8$) for S3DIS Area~5, and $58.7$ PQ ($+25.2$) for ScanNetV2. We also set the first state-of-the-art for two large-scale mobile mapping benchmarks: KITTI-360 and DALES. With only $209$k parameters, our model is over $30$ times smaller than the best-competing method and trains up to $15$ times faster. Our code and pretrained models are available at https://github.com/drprojects/superpoint_transformer.
Efficient 3D Semantic Segmentation with Superpoint Transformer
Jun 13, 2023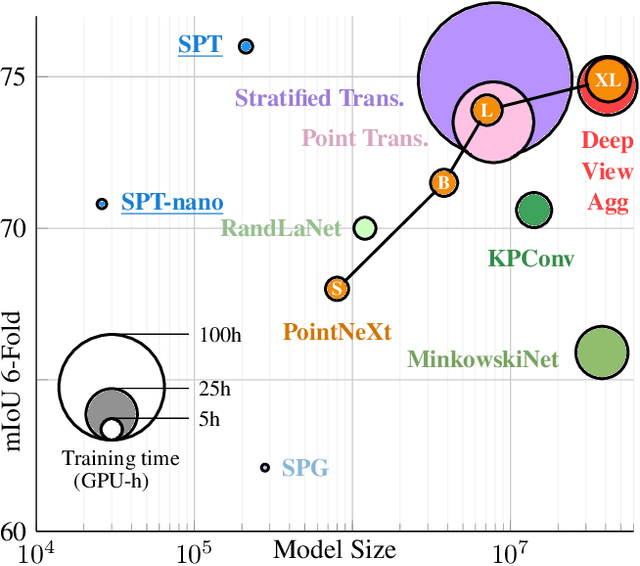
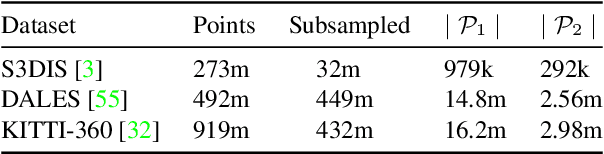
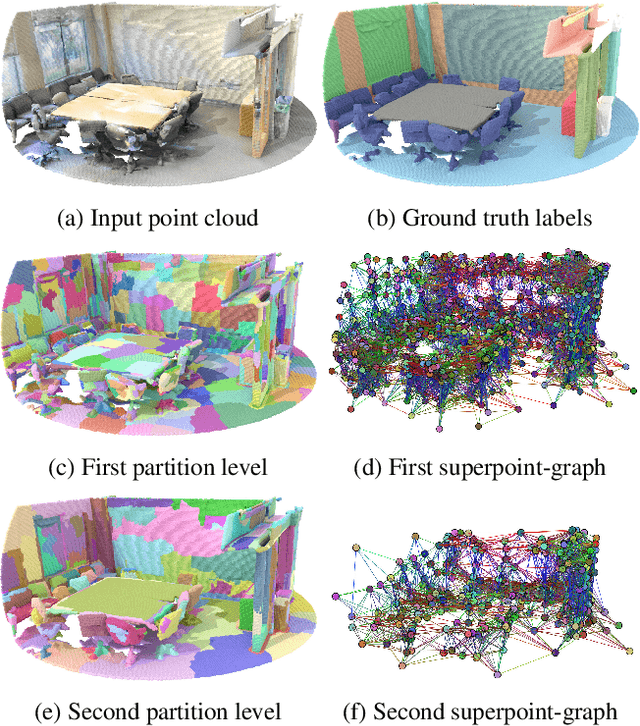
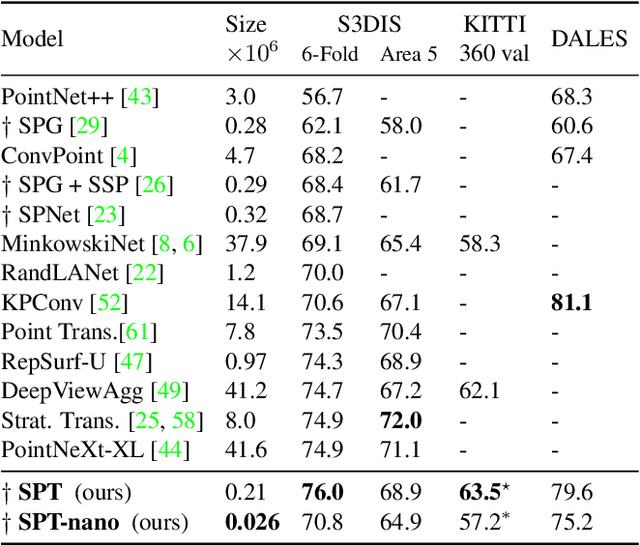
We introduce a novel superpoint-based transformer architecture for efficient semantic segmentation of large-scale 3D scenes. Our method incorporates a fast algorithm to partition point clouds into a hierarchical superpoint structure, which makes our preprocessing 7 times times faster than existing superpoint-based approaches. Additionally, we leverage a self-attention mechanism to capture the relationships between superpoints at multiple scales, leading to state-of-the-art performance on three challenging benchmark datasets: S3DIS (76.0% mIoU 6-fold validation), KITTI-360 (63.5% on Val), and DALES (79.6%). With only 212k parameters, our approach is up to 200 times more compact than other state-of-the-art models while maintaining similar performance. Furthermore, our model can be trained on a single GPU in 3 hours for a fold of the S3DIS dataset, which is 7x to 70x fewer GPU-hours than the best-performing methods. Our code and models are accessible at github.com/drprojects/superpoint_transformer.
Learning Multi-View Aggregation In the Wild for Large-Scale 3D Semantic Segmentation
Apr 15, 2022

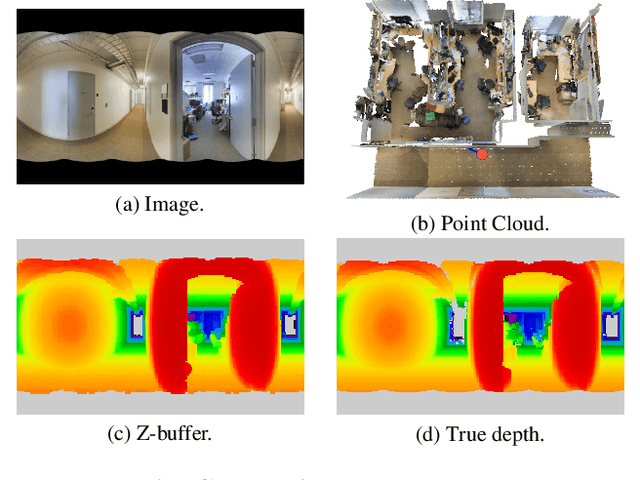

Recent works on 3D semantic segmentation propose to exploit the synergy between images and point clouds by processing each modality with a dedicated network and projecting learned 2D features onto 3D points. Merging large-scale point clouds and images raises several challenges, such as constructing a mapping between points and pixels, and aggregating features between multiple views. Current methods require mesh reconstruction or specialized sensors to recover occlusions, and use heuristics to select and aggregate available images. In contrast, we propose an end-to-end trainable multi-view aggregation model leveraging the viewing conditions of 3D points to merge features from images taken at arbitrary positions. Our method can combine standard 2D and 3D networks and outperforms both 3D models operating on colorized point clouds and hybrid 2D/3D networks without requiring colorization, meshing, or true depth maps. We set a new state-of-the-art for large-scale indoor/outdoor semantic segmentation on S3DIS (74.7 mIoU 6-Fold) and on KITTI-360 (58.3 mIoU). Our full pipeline is accessible at https://github.com/drprojects/DeepViewAgg, and only requires raw 3D scans and a set of images and poses.