 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAIL: Self-supervised Albedo Estimation from Real Images with a Latent Diffusion Model
May 26, 2025Intrinsic image decomposition aims at separating an image into its underlying albedo and shading components, isolating the base color from lighting effects to enable downstream applications such as virtual relighting and scene editing. Despite the rise and success of learning-based approaches, intrinsic image decomposition from real-world images remains a significant challenging task due to the scarcity of labeled ground-truth data. Most existing solutions rely on synthetic data as supervised setups, limiting their ability to generalize to real-world scenes. Self-supervised methods, on the other hand, often produce albedo maps that contain reflections and lack consistency under different lighting conditions. To address this, we propose SAIL, an approach designed to estimate albedo-like representations from single-view real-world images. We repurpose the prior knowledge of a latent diffusion model for unconditioned scene relighting as a surrogate objective for albedo estimation. To extract the albedo, we introduce a novel intrinsic image decomposition fully formulated in the latent space. To guide the training of our latent diffusion model, we introduce regularization terms that constrain both the lighting-dependent and independent components of our latent image decomposition. SAIL predicts stable albedo under varying lighting conditions and generalizes to multiple scenes, using only unlabeled multi-illumination data available online.
SCILLA: SurfaCe Implicit Learning for Large Urban Area, a volumetric hybrid solution
Mar 15, 2024



Neural implicit surface representation methods have recently shown impressive 3D reconstruction results. However, existing solutions struggle to reconstruct urban outdoor scenes due to their large, unbounded, and highly detailed nature. Hence, to achieve accurate reconstructions, additional supervision data such as LiDAR, strong geometric priors, and long training times are required. To tackle such issues, we present SCILLA, a new hybrid implicit surface learning method to reconstruct large driving scenes from 2D images. SCILLA's hybrid architecture models two separate implicit fields: one for the volumetric density and another for the signed distance to the surface. To accurately represent urban outdoor scenarios, we introduce a novel volume-rendering strategy that relies on self-supervised probabilistic density estimation to sample points near the surface and transition progressively from volumetric to surface representation. Our solution permits a proper and fast initialization of the signed distance field without relying on any geometric prior on the scene, compared to concurrent methods. By conducting extensive experiments on four outdoor driving datasets, we show that SCILLA can learn an accurate and detailed 3D surface scene representation in various urban scenarios while being two times faster to train compared to previous state-of-the-art solutions.
DH-PTAM: A Deep Hybrid Stereo Events-Frames Parallel Tracking And Mapping System
Jun 02, 2023



This paper presents a robust approach for a visual parallel tracking and mapping (PTAM) system that excels in challenging environments. Our proposed method combines the strengths of heterogeneous multi-modal visual sensors, including stereo event-based and frame-based sensors, in a unified reference frame through a novel spatio-temporal synchronization of stereo visual frames and stereo event streams. We employ deep learning-based feature extraction and description for estimation to enhance robustness further. We also introduce an end-to-end parallel tracking and mapping optimization layer complemented by a simple loop-closure algorithm for efficient SLAM behavior. Through comprehensive experiments on both small-scale and large-scale real-world sequences of VECtor and TUM-VIE benchmarks, our proposed method (DH-PTAM) demonstrates superior performance compared to state-of-the-art methods in terms of robustness and accuracy in adverse conditions. Our implementation's research-based Python API is publicly available on GitHub for further research and development: https://github.com/AbanobSoliman/DH-PTAM.
IBISCape: A Simulated Benchmark for multi-modal SLAM Systems Evaluation in Large-scale Dynamic Environments
Jun 27, 2022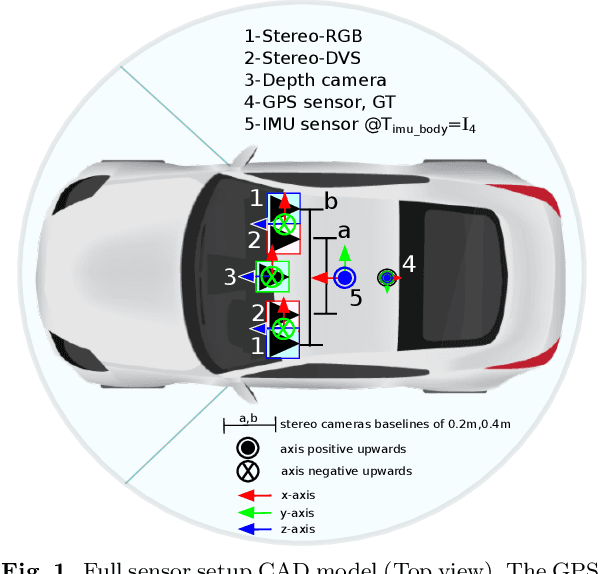
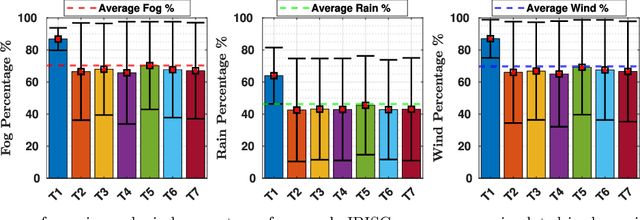
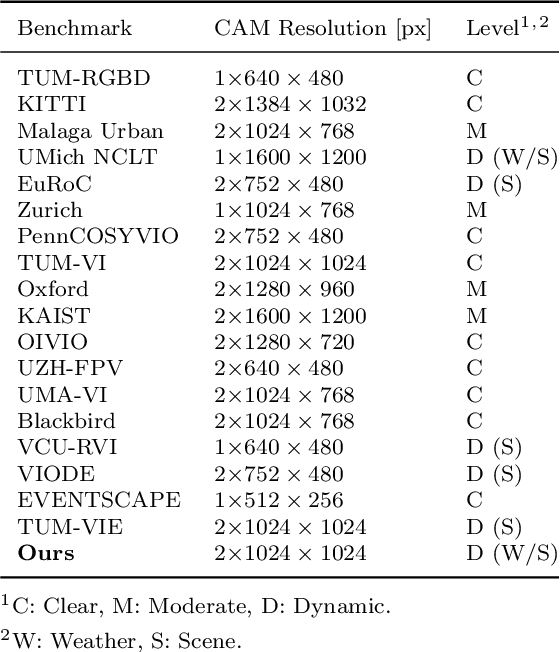

The development process of high-fidelity SLAM systems depends on their validation upon reliable datasets. Towards this goal, we propose IBISCape, a simulated benchmark that includes data synchronization and acquisition APIs for telemetry from heterogeneous sensors: stereo-RGB/DVS, Depth, IMU, and GPS, along with the ground truth scene segmentation and vehicle ego-motion. Our benchmark is built upon the CARLA simulator, whose back-end is the Unreal Engine rendering a high dynamic scenery simulating the real world. Moreover, we offer 34 multi-modal datasets suitable for autonomous vehicles navigation, including scenarios for scene understanding evaluation like accidents, along with a wide range of frame quality based on a dynamic weather simulation class integrated with our APIs. We also introduce the first calibration targets to CARLA maps to solve the unknown distortion parameters problem of CARLA simulated DVS and RGB cameras. Finally, using IBISCape sequences, we evaluate four ORB-SLAM3 systems (monocular RGB, stereo RGB, Stereo Visual Inertial (SVI), and RGB-D) performance and BASALT Visual-Inertial Odometry (VIO) system on various sequences collected in simulated large-scale dynamic environments. Keywords: benchmark, multi-modal, datasets, Odometry, Calibration, DVS, SLAM
Towards urban scenes understanding through polarization cues
Jun 03, 2021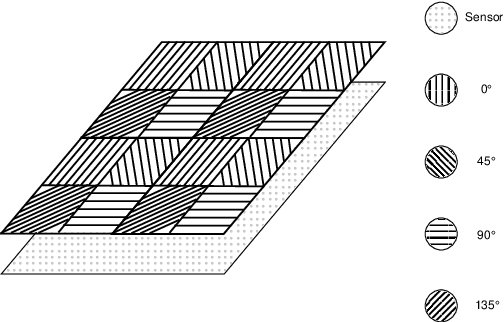

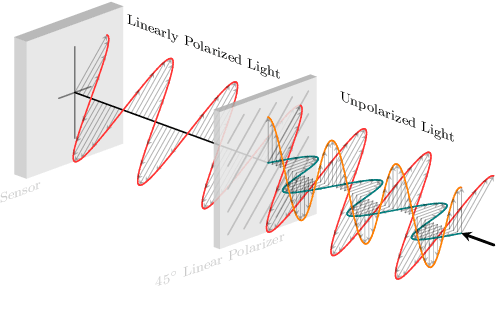
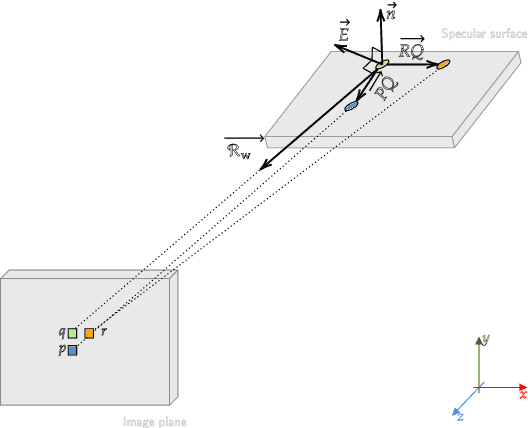
Autonomous robotics is critically affected by the robustness of its scene understanding algorithms. We propose a two-axis pipeline based on polarization indices to analyze dynamic urban scenes. As robots evolve in unknown environments, they are prone to encountering specular obstacles. Usually, specular phenomena are rarely taken into account by algorithms which causes misinterpretations and erroneous estimates. By exploiting all the light properties, systems can greatly increase their robustness to events. In addition to the conventional photometric characteristics, we propose to include polarization sensing. We demonstrate in this paper that the contribution of polarization measurement increases both the performances of segmentation and the quality of depth estimation. Our polarimetry-based approaches are compared here with other state-of-the-art RGB-centric methods showing interest of using polarization imaging.
P2D: a self-supervised method for depth estimation from polarimetry
Jul 15, 2020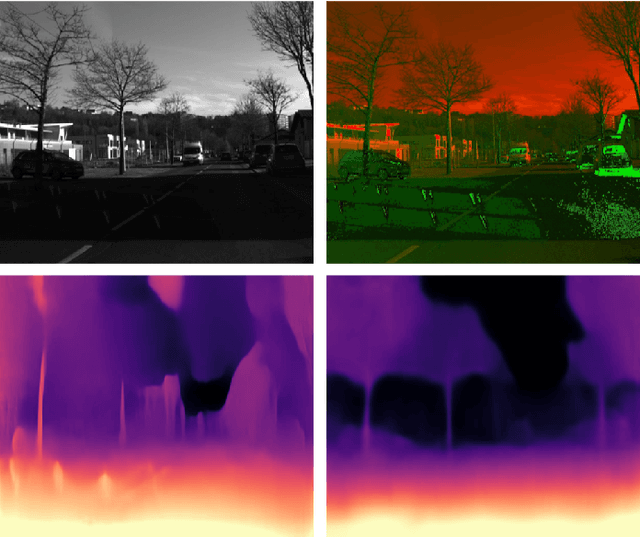

Monocular depth estimation is a recurring subject in the field of computer vision. Its ability to describe scenes via a depth map while reducing the constraints related to the formulation of perspective geometry tends to favor its use. However, despite the constant improvement of algorithms, most methods exploit only colorimetric information. Consequently, robustness to events to which the modality is not sensitive to, like specularity or transparency, is neglected. In response to this phenomenon, we propose using polarimetry as an input for a self-supervised monodepth network. Therefore, we propose exploiting polarization cues to encourage accurate reconstruction of scenes. Furthermore, we include a term of polarimetric regularization to state-of-the-art method to take specific advantage of the data. Our method is evaluated both qualitatively and quantitatively demonstrating that the contribution of this new information as well as an enhanced loss function improves depth estimation results, especially for specular areas.
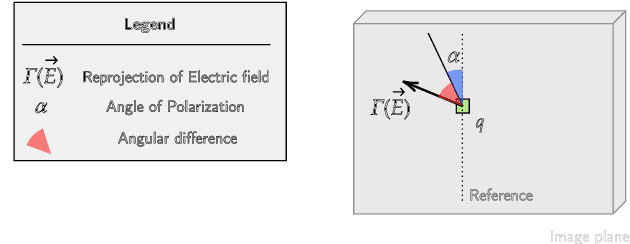
Polarimetric image augmentation
May 22, 2020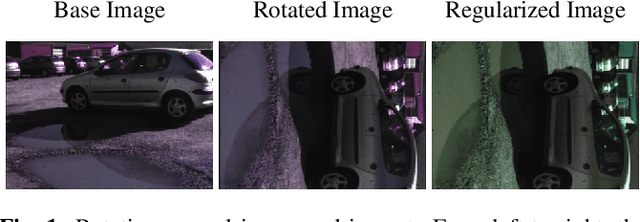

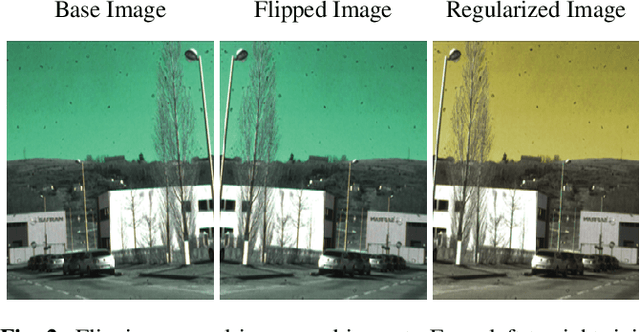
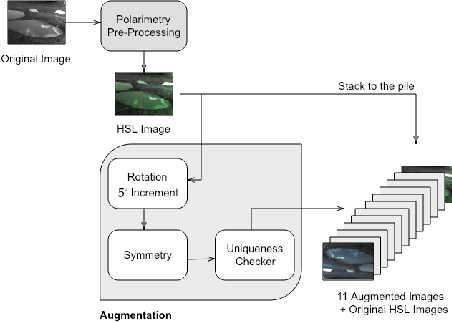
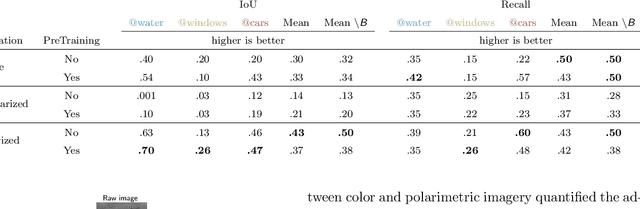
Robotics applications in urban environments are subject to obstacles that exhibit specular reflections hampering autonomous navigation. On the other hand, these reflections are highly polarized and this extra information can successfully be used to segment the specular areas. In nature, polarized light is obtained by reflection or scattering. Deep Convolutional Neural Networks (DCNNs) have shown excellent segmentation results, but require a significant amount of data to achieve best performances. The lack of data is usually overcomed by using augmentation methods. However, unlike RGB images, polarization images are not only scalar (intensity) images and standard augmentation techniques cannot be applied straightforwardly. We propose to enhance deep learning models through a regularized augmentation procedure applied to polarimetric data in order to characterize scenes more effectively under challenging conditions. We subsequently observe an average of 18.1% improvement in IoU between non augmented and regularized training procedures on real world data.
Myocardial Infarction Quantification From Late Gadolinium Enhancement MRI Using Top-hat Transforms and Neural Networks
Jan 09, 2019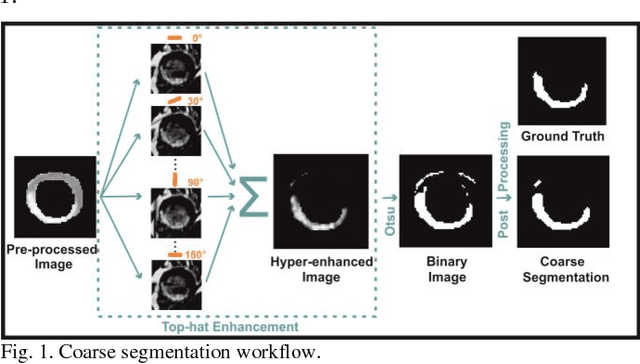
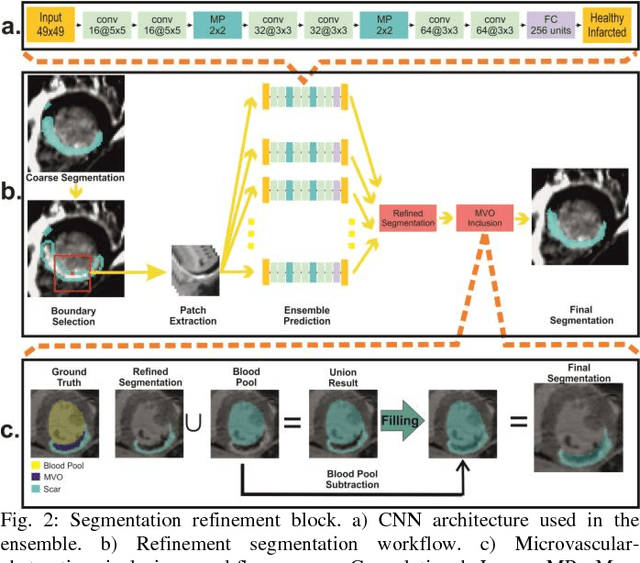
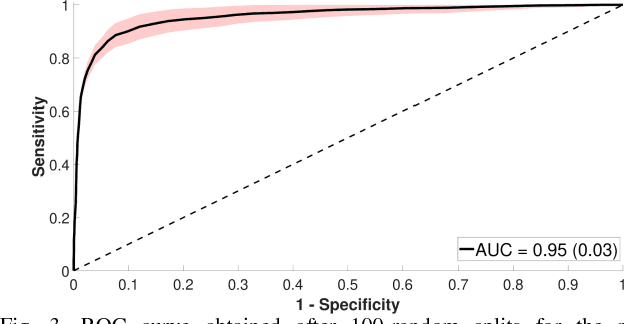
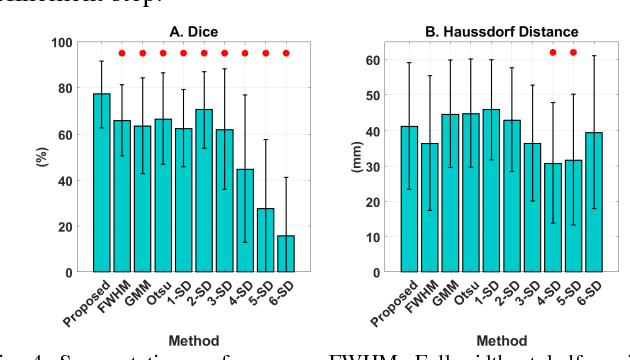
Significance: Late gadolinium enhanced magnetic resonance imaging (LGE-MRI) is the gold standard technique for myocardial viability assessment. Although the technique accurately reflects the damaged tissue, there is no clinical standard for quantifying myocardial infarction (MI), demanding most algorithms to be expert dependent. Objectives and Methods: In this work a new automatic method for MI quantification from LGE-MRI is proposed. Our novel segmentation approach is devised for accurately detecting not only hyper-enhanced lesions, but also microvascular-obstructed areas. Moreover, it includes a myocardial disease detection step which extends the algorithm for working under healthy scans. The method is based on a cascade approach where firstly, diseased slices are identified by a convolutional neural network (CNN). Secondly, by means of morphological operations a fast coarse scar segmentation is obtained. Thirdly, the segmentation is refined by a boundary-voxel reclassification strategy using an ensemble of CNNs. For its validation, reproducibility and further comparison against other methods, we tested the method on a big multi-field expert annotated LGE-MRI database including healthy and diseased cases. Results and Conclusion: In an exhaustive comparison against nine reference algorithms, the proposal achieved state-of-the-art segmentation performances and showed to be the only method agreeing in volumetric scar quantification with the expert delineations. Moreover, the method was able to reproduce the intra- and inter-observer variability ranges. It is concluded that the method could suitably be transferred to clinical scenarios.