 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards urban scenes understanding through polarization cues
Jun 03, 2021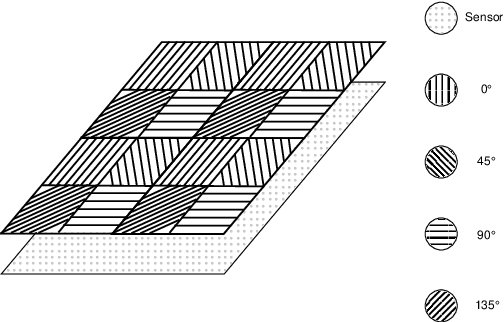

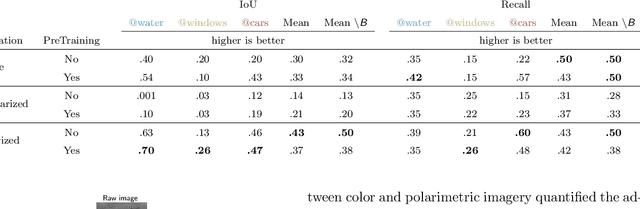
Autonomous robotics is critically affected by the robustness of its scene understanding algorithms. We propose a two-axis pipeline based on polarization indices to analyze dynamic urban scenes. As robots evolve in unknown environments, they are prone to encountering specular obstacles. Usually, specular phenomena are rarely taken into account by algorithms which causes misinterpretations and erroneous estimates. By exploiting all the light properties, systems can greatly increase their robustness to events. In addition to the conventional photometric characteristics, we propose to include polarization sensing. We demonstrate in this paper that the contribution of polarization measurement increases both the performances of segmentation and the quality of depth estimation. Our polarimetry-based approaches are compared here with other state-of-the-art RGB-centric methods showing interest of using polarization imaging.
P2D: a self-supervised method for depth estimation from polarimetry
Jul 15, 2020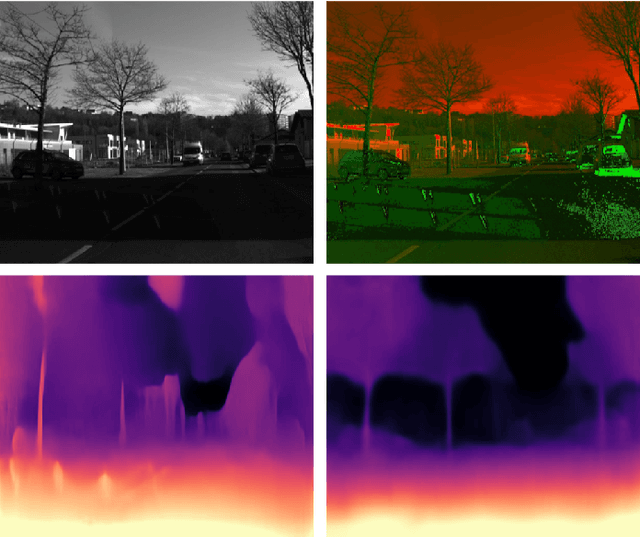

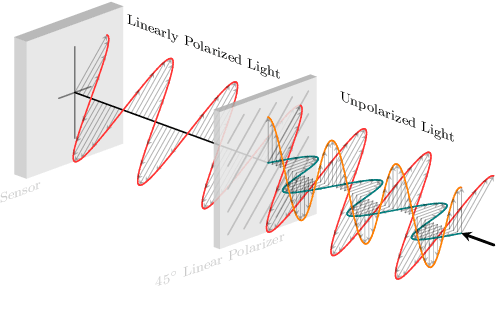
Monocular depth estimation is a recurring subject in the field of computer vision. Its ability to describe scenes via a depth map while reducing the constraints related to the formulation of perspective geometry tends to favor its use. However, despite the constant improvement of algorithms, most methods exploit only colorimetric information. Consequently, robustness to events to which the modality is not sensitive to, like specularity or transparency, is neglected. In response to this phenomenon, we propose using polarimetry as an input for a self-supervised monodepth network. Therefore, we propose exploiting polarization cues to encourage accurate reconstruction of scenes. Furthermore, we include a term of polarimetric regularization to state-of-the-art method to take specific advantage of the data. Our method is evaluated both qualitatively and quantitatively demonstrating that the contribution of this new information as well as an enhanced loss function improves depth estimation results, especially for specular areas.
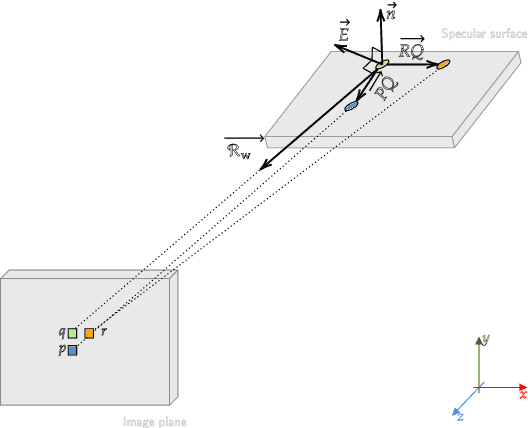
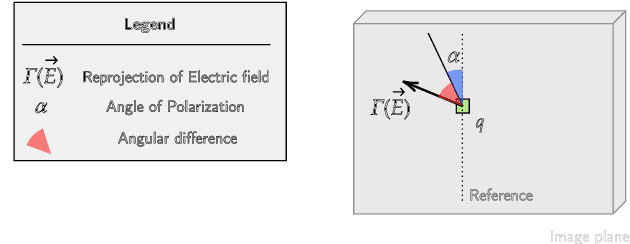
Polarimetric image augmentation
May 22, 2020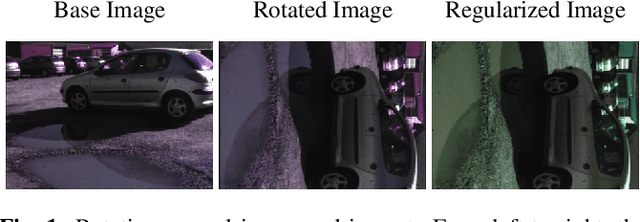

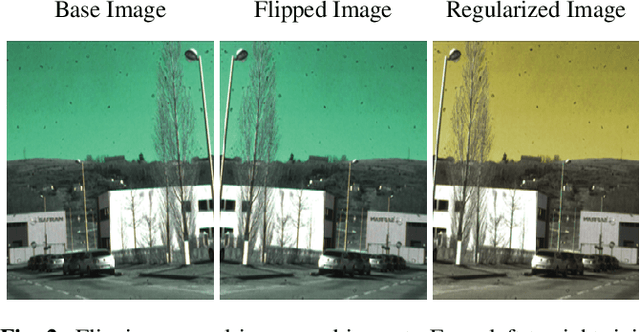
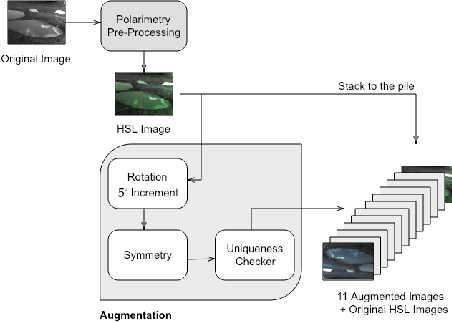
Robotics applications in urban environments are subject to obstacles that exhibit specular reflections hampering autonomous navigation. On the other hand, these reflections are highly polarized and this extra information can successfully be used to segment the specular areas. In nature, polarized light is obtained by reflection or scattering. Deep Convolutional Neural Networks (DCNNs) have shown excellent segmentation results, but require a significant amount of data to achieve best performances. The lack of data is usually overcomed by using augmentation methods. However, unlike RGB images, polarization images are not only scalar (intensity) images and standard augmentation techniques cannot be applied straightforwardly. We propose to enhance deep learning models through a regularized augmentation procedure applied to polarimetric data in order to characterize scenes more effectively under challenging conditions. We subsequently observe an average of 18.1% improvement in IoU between non augmented and regularized training procedures on real world data.