 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarimetric image augmentation
Paper and Code
May 22, 2020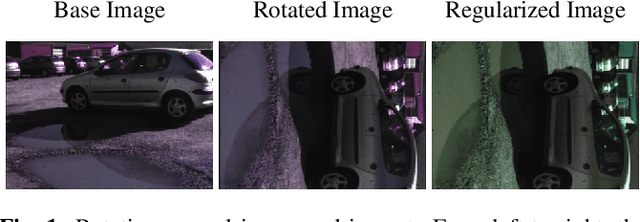

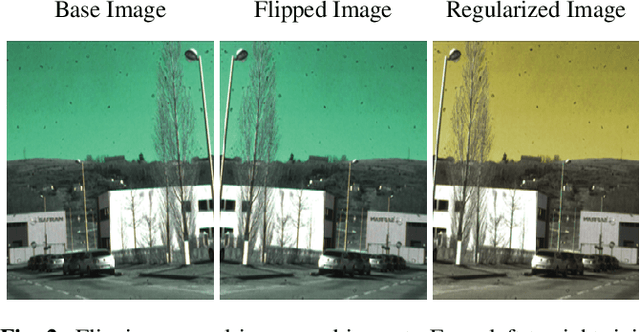
Robotics applications in urban environments are subject to obstacles that exhibit specular reflections hampering autonomous navigation. On the other hand, these reflections are highly polarized and this extra information can successfully be used to segment the specular areas. In nature, polarized light is obtained by reflection or scattering. Deep Convolutional Neural Networks (DCNNs) have shown excellent segmentation results, but require a significant amount of data to achieve best performances. The lack of data is usually overcomed by using augmentation methods. However, unlike RGB images, polarization images are not only scalar (intensity) images and standard augmentation techniques cannot be applied straightforwardly. We propose to enhance deep learning models through a regularized augmentation procedure applied to polarimetric data in order to characterize scenes more effectively under challenging conditions. We subsequently observe an average of 18.1% improvement in IoU between non augmented and regularized training procedures on real world data.