 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTRIDE: Street View-based Environmental Feature Detection and Pedestrian Collision Prediction
Aug 25, 2023



This paper introduces a novel benchmark to study the impact and relationship of built environment elements on pedestrian collision prediction, intending to enhance environmental awareness in autonomous driving systems to prevent pedestrian injuries actively. We introduce a built environment detection task in large-scale panoramic images and a detection-based pedestrian collision frequency prediction task. We propose a baseline method that incorporates a collision prediction module into a state-of-the-art detection model to tackle both tasks simultaneously. Our experiments demonstrate a significant correlation between object detection of built environment elements and pedestrian collision frequency prediction. Our results are a stepping stone towards understanding the interdependencies between built environment conditions and pedestrian safety.
Video Swin Transformers for Egocentric Video Understanding @ Ego4D Challenges 2022
Jul 22, 2022
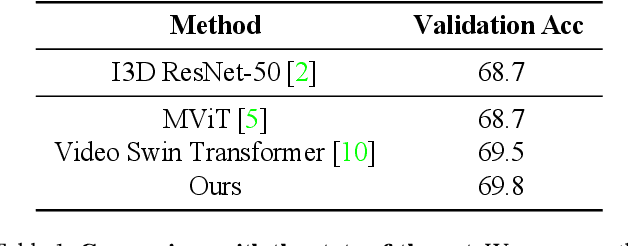
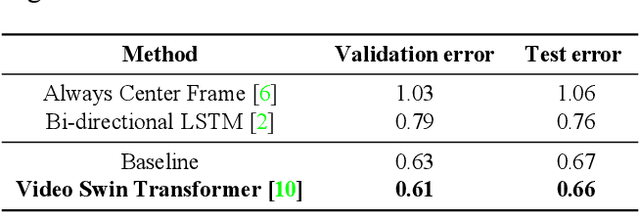
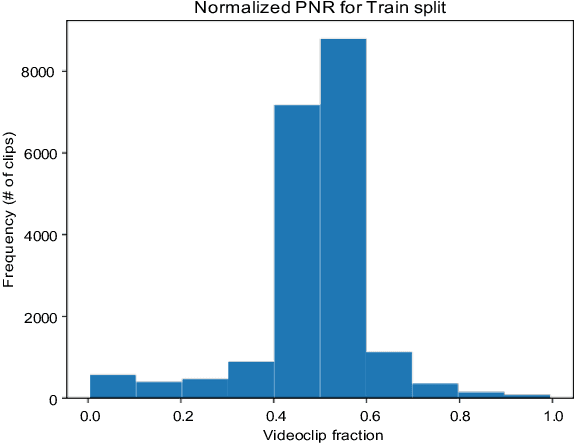
We implemented Video Swin Transformer as a base architecture for the tasks of Point-of-No-Return temporal localization and Object State Change Classification. Our method achieved competitive performance on both challenges.
SIMBA: Specific Identity Markers for Bone Age Assessment
Jul 13, 2020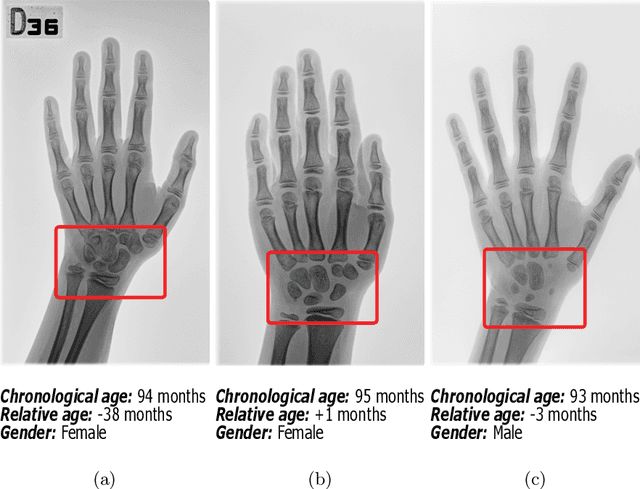
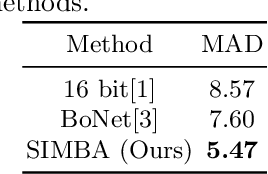
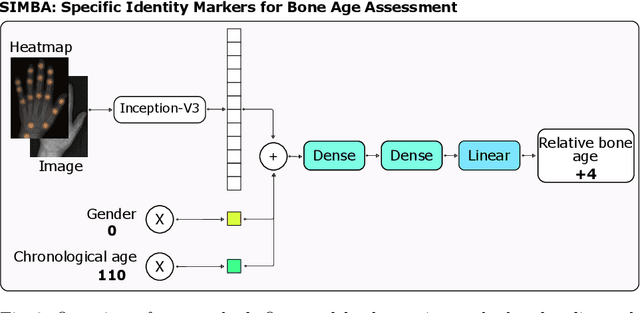
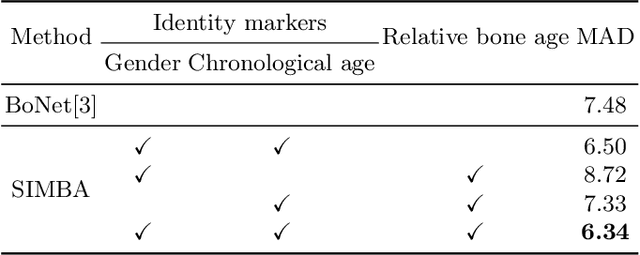
Bone Age Assessment (BAA) is a task performed by radiologists to diagnose abnormal growth in a child. In manual approaches, radiologists take into account different identity markers when calculating bone age, i.e., chronological age and gender. However, the current automated Bone Age Assessment methods do not completely exploit the information present in the patient's metadata. With this lack of available methods as motivation, we present SIMBA: Specific Identity Markers for Bone Age Assessment. SIMBA is a novel approach for the task of BAA based on the use of identity markers. For this purpose, we build upon the state-of-the-art model, fusing the information present in the identity markers with the visual features created from the original hand radiograph. We then use this robust representation to estimate the patient's relative bone age: the difference between chronological age and bone age. We validate SIMBA on the Radiological Hand Pose Estimation dataset and find that it outperforms previous state-of-the-art methods. SIMBA sets a trend of a new wave of Computer-aided Diagnosis methods that incorporate all of the data that is available regarding a patient. To promote further research in this area and ensure reproducibility we will provide the source code as well as the pre-trained models of SIMBA.
ISINet: An Instance-Based Approach for Surgical Instrument Segmentation
Jul 10, 2020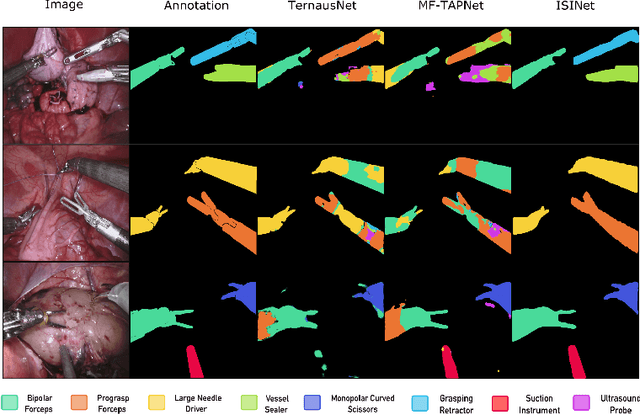
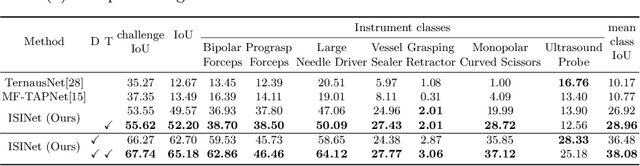
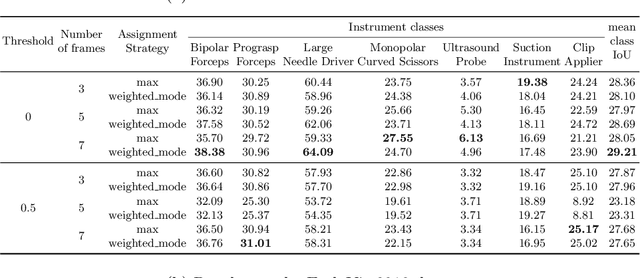
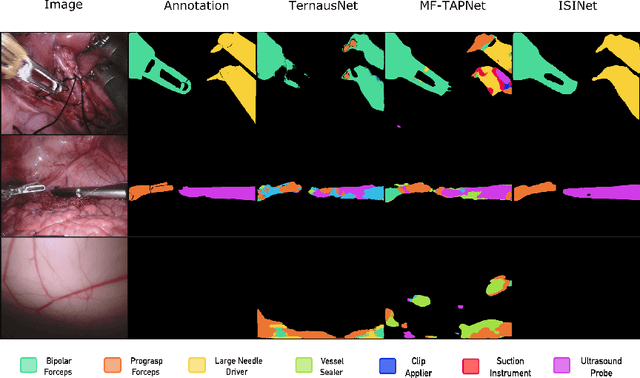
We study the task of semantic segmentation of surgical instruments in robotic-assisted surgery scenes. We propose the Instance-based Surgical Instrument Segmentation Network (ISINet), a method that addresses this task from an instance-based segmentation perspective. Our method includes a temporal consistency module that takes into account the previously overlooked and inherent temporal information of the problem. We validate our approach on the existing benchmark for the task, the Endoscopic Vision 2017 Robotic Instrument Segmentation Dataset, and on the 2018 version of the dataset, whose annotations we extended for the fine-grained version of instrument segmentation. Our results show that ISINet significantly outperforms state-of-the-art methods, with our baseline version duplicating the Intersection over Union (IoU) of previous methods and our complete model triplicating the IoU.
Robust Medical Instrument Segmentation Challenge 2019
Mar 23, 2020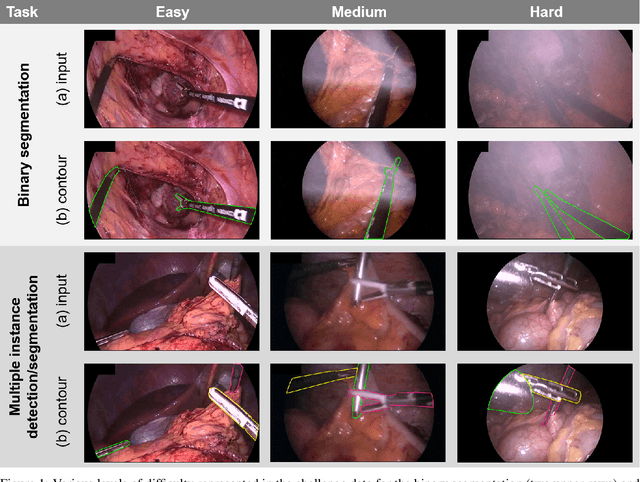
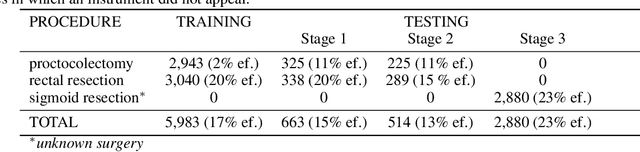
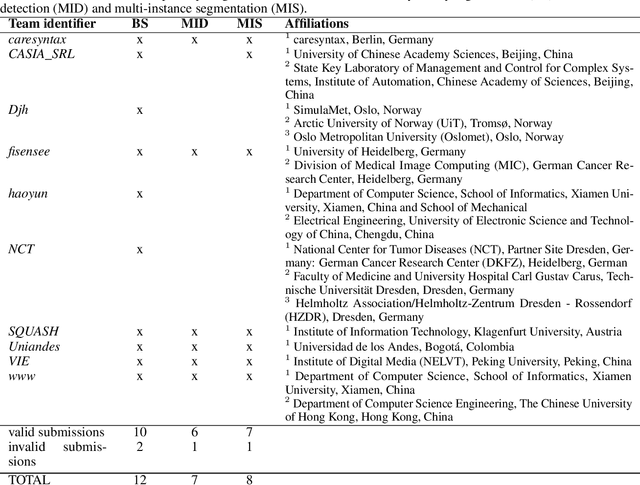
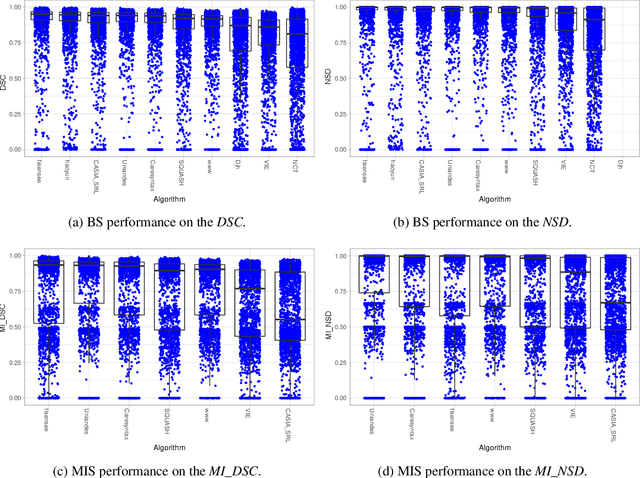
Intraoperative tracking of laparoscopic instruments is often a prerequisite for computer and robotic-assisted interventions. While numerous methods for detecting, segmenting and tracking of medical instruments based on endoscopic video images have been proposed in the literature, key limitations remain to be addressed: Firstly, robustness, that is, the reliable performance of state-of-the-art methods when run on challenging images (e.g. in the presence of blood, smoke or motion artifacts). Secondly, generalization; algorithms trained for a specific intervention in a specific hospital should generalize to other interventions or institutions. In an effort to promote solutions for these limitations, we organized the Robust Medical Instrument Segmentation (ROBUST-MIS) challenge as an international benchmarking competition with a specific focus on the robustness and generalization capabilities of algorithms. For the first time in the field of endoscopic image processing, our challenge included a task on binary segmentation and also addressed multi-instance detection and segmentation. The challenge was based on a surgical data set comprising 10,040 annotated images acquired from a total of 30 surgical procedures from three different types of surgery. The validation of the competing methods for the three tasks (binary segmentation, multi-instance detection and multi-instance segmentation) was performed in three different stages with an increasing domain gap between the training and the test data. The results confirm the initial hypothesis, namely that algorithm performance degrades with an increasing domain gap. While the average detection and segmentation quality of the best-performing algorithms is high, future research should concentrate on detection and segmentation of small, crossing, moving and transparent instrument(s) (parts).