 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Perception meets Reactive Motion Generation
Oct 06, 2017

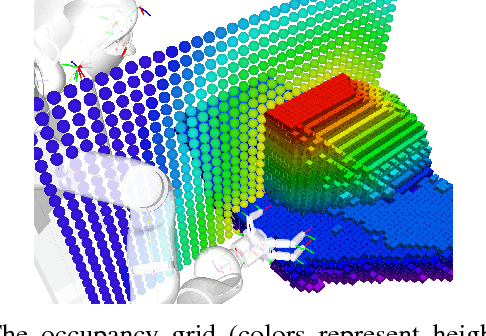
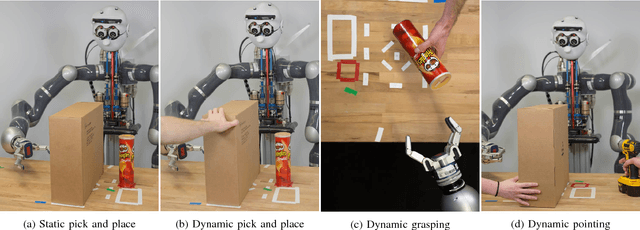
We address the challenging problem of robotic grasping and manipulation in the presence of uncertainty. This uncertainty is due to noisy sensing, inaccurate models and hard-to-predict environment dynamics. We quantify the importance of continuous, real-time perception and its tight integration with reactive motion generation methods in dynamic manipulation scenarios. We compare three different systems that are instantiations of the most common architectures in the field: (i) a traditional sense-plan-act approach that is still widely used, (ii) a myopic controller that only reacts to local environment dynamics and (iii) a reactive planner that integrates feedback control and motion optimization. All architectures rely on the same components for real-time perception and reactive motion generation to allow a quantitative evaluation. We extensively evaluate the systems on a real robotic platform in four scenarios that exhibit either a challenging workspace geometry or a dynamic environment. In 333 experiments, we quantify the robustness and accuracy that is due to integrating real-time feedback at different time scales in a reactive motion generation system. We also report on the lessons learned for system building.
Probabilistic Articulated Real-Time Tracking for Robot Manipulation
Nov 25, 2016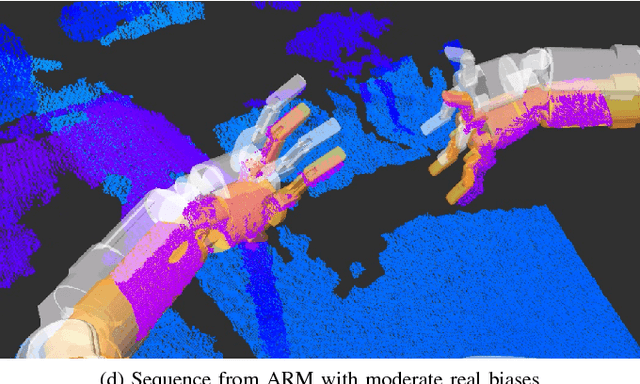
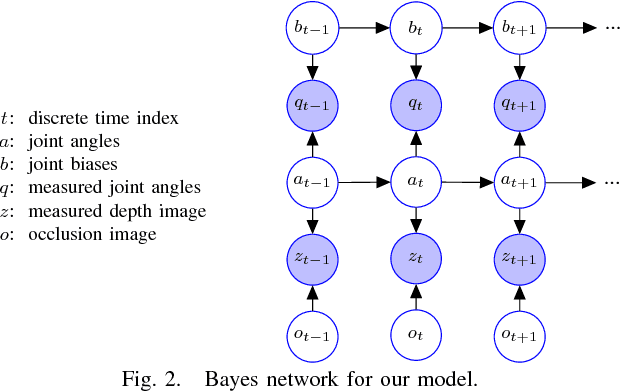
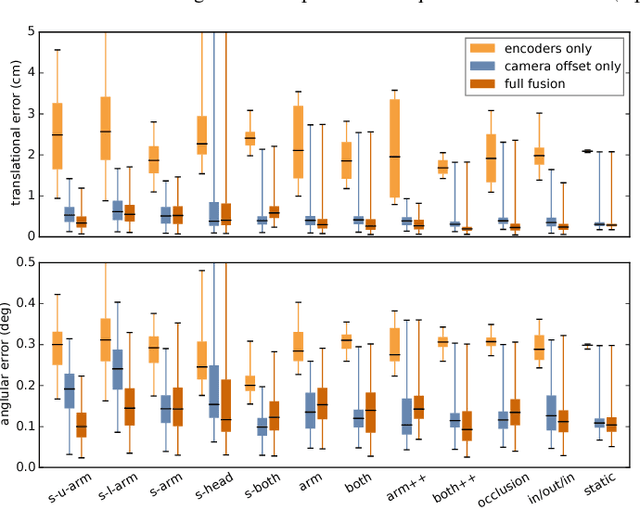
We propose a probabilistic filtering method which fuses joint measurements with depth images to yield a precise, real-time estimate of the end-effector pose in the camera frame. This avoids the need for frame transformations when using it in combination with visual object tracking methods. Precision is achieved by modeling and correcting biases in the joint measurements as well as inaccuracies in the robot model, such as poor extrinsic camera calibration. We make our method computationally efficient through a principled combination of Kalman filtering of the joint measurements and asynchronous depth-image updates based on the Coordinate Particle Filter. We quantitatively evaluate our approach on a dataset recorded from a real robotic platform, annotated with ground truth from a motion capture system. We show that our approach is robust and accurate even under challenging conditions such as fast motion, significant and long-term occlusions, and time-varying biases. We release the dataset along with open-source code of our approach to allow for quantitative comparison with alternative approaches.
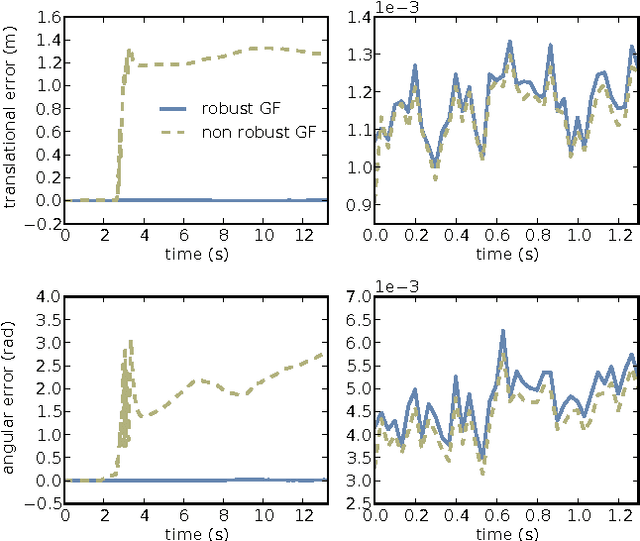
Robust Gaussian Filtering using a Pseudo Measurement
May 30, 2016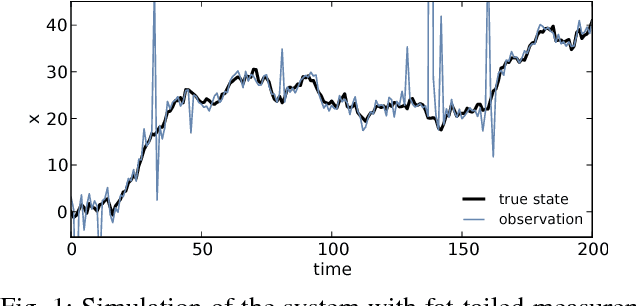
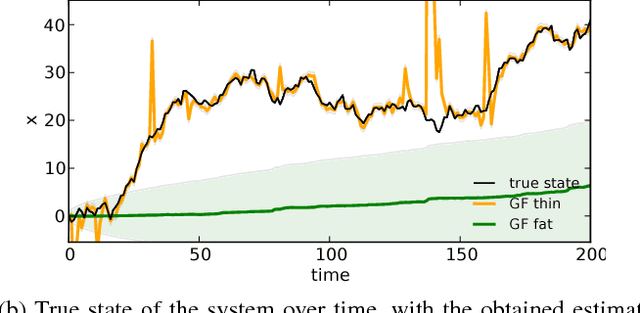
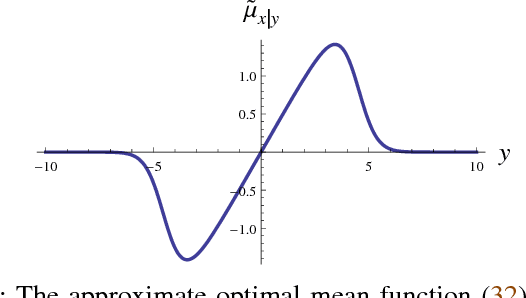
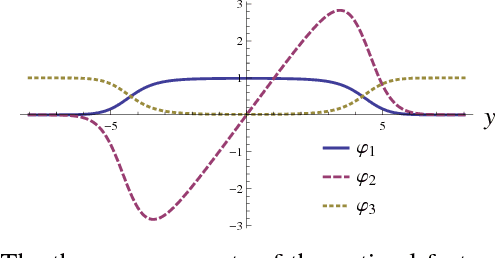
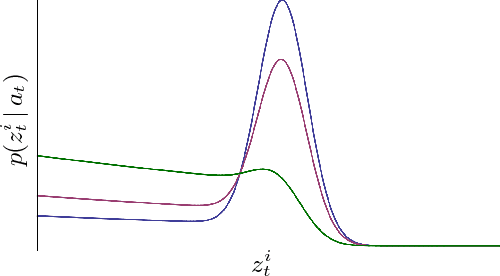
Many sensors, such as range, sonar, radar, GPS and visual devices, produce measurements which are contaminated by outliers. This problem can be addressed by using fat-tailed sensor models, which account for the possibility of outliers. Unfortunately, all estimation algorithms belonging to the family of Gaussian filters (such as the widely-used extended Kalman filter and unscented Kalman filter) are inherently incompatible with such fat-tailed sensor models. The contribution of this paper is to show that any Gaussian filter can be made compatible with fat-tailed sensor models by applying one simple change: Instead of filtering with the physical measurement, we propose to filter with a pseudo measurement obtained by applying a feature function to the physical measurement. We derive such a feature function which is optimal under some conditions. Simulation results show that the proposed method can effectively handle measurement outliers and allows for robust filtering in both linear and nonlinear systems.
Depth-Based Object Tracking Using a Robust Gaussian Filter
Feb 19, 2016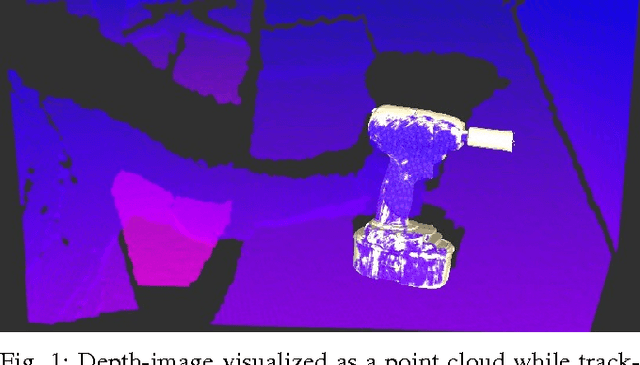
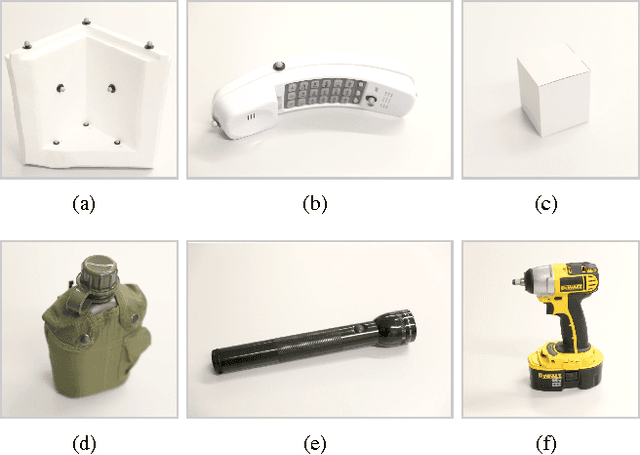
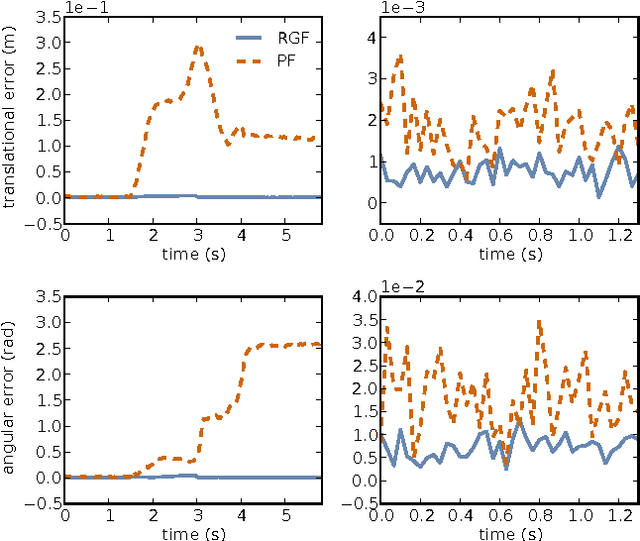
We consider the problem of model-based 3D-tracking of objects given dense depth images as input. Two difficulties preclude the application of a standard Gaussian filter to this problem. First of all, depth sensors are characterized by fat-tailed measurement noise. To address this issue, we show how a recently published robustification method for Gaussian filters can be applied to the problem at hand. Thereby, we avoid using heuristic outlier detection methods that simply reject measurements if they do not match the model. Secondly, the computational cost of the standard Gaussian filter is prohibitive due to the high-dimensional measurement, i.e. the depth image. To address this problem, we propose an approximation to reduce the computational complexity of the filter. In quantitative experiments on real data we show how our method clearly outperforms the standard Gaussian filter. Furthermore, we compare its performance to a particle-filter-based tracking method, and observe comparable computational efficiency and improved accuracy and smoothness of the estimates.